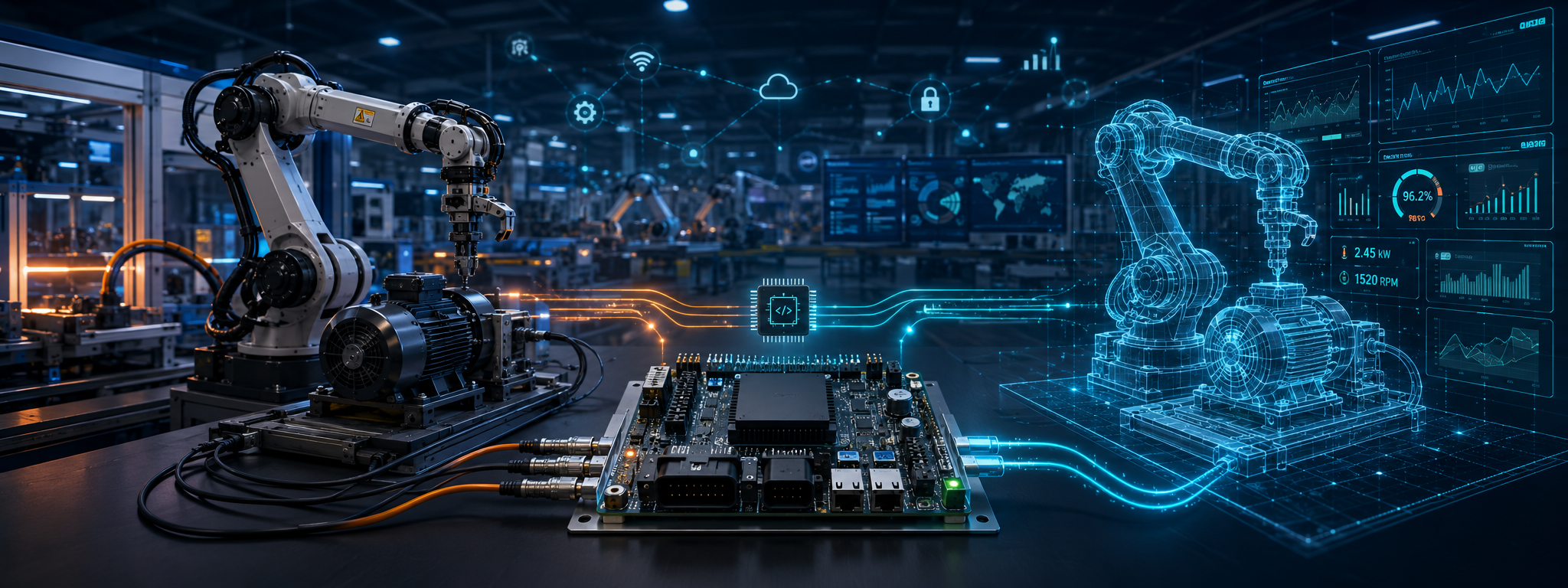
Entenda o que é Hardware in the Loop, como o HIL é aplicado em sistemas embarcados e industriais, e sua relação com Indústria 4.0 e Gêmeos Digitais.

ESP32-E22: Wi-Fi 6E, 2,4 Gbps e conectividade avançada para sistemas embarcados LinuxESP32-E22: Wi-Fi 6E, 2,4 Gbps e conectividade avançada para sistemas embarcados Linux
A Espressif tornou-se amplamente conhecida entre desenvolvedores de sistemas embarcados por integrar microcontroladores, Wi-Fi e Bluetooth em dispositivos acessíveis e relativamente simples de programar. Com o ESP32-E22, entretanto, a empresa

Os 5 níveis de maturidade do Gêmeo DigitalOs 5 níveis de maturidade do Gêmeo Digital
Entenda os 5 níveis de maturidade do Gêmeo Digital: status, informativo, preditivo, otimização e autônomo, com exemplos práticos e aplicação na Indústria 4.0.
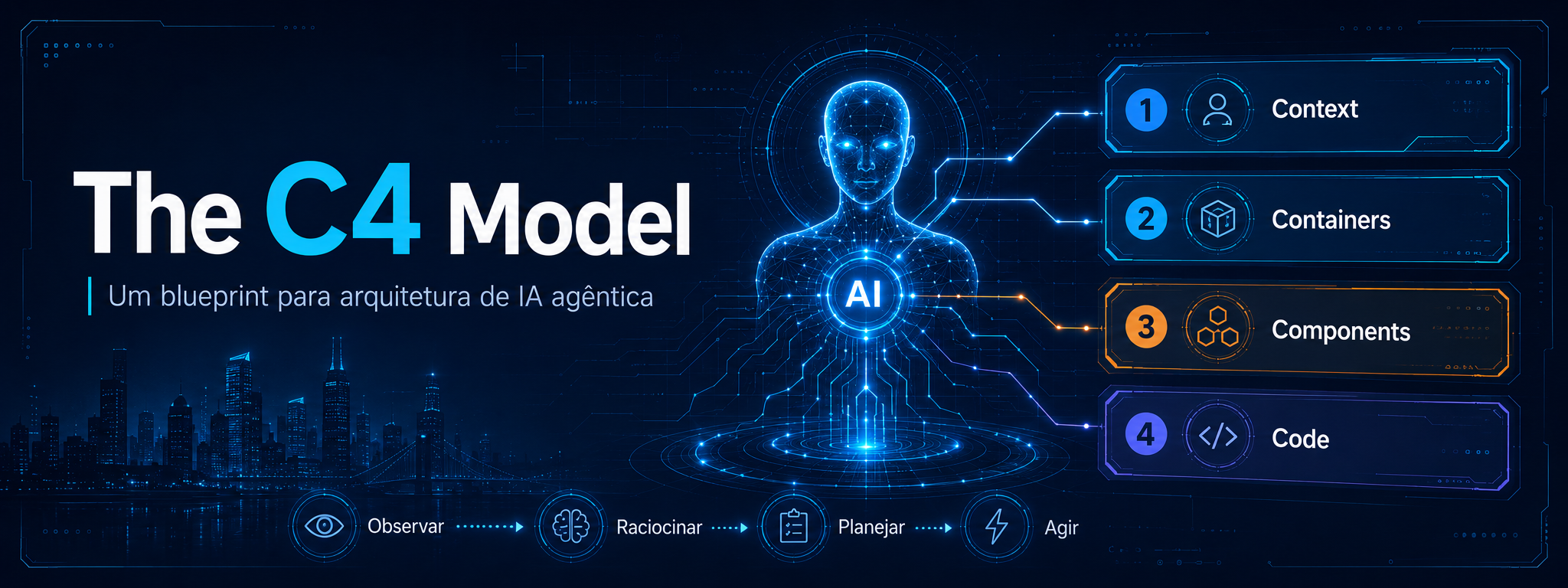
The C4 Model: um blueprint para arquiteturas de IA agênticaThe C4 Model: um blueprint para arquiteturas de IA agêntica
A IA agêntica exige arquiteturas mais claras, seguras e bem documentadas. Neste artigo, explico como o C4 Model pode ser usado como uma planta arquitetural para representar sistemas com agentes
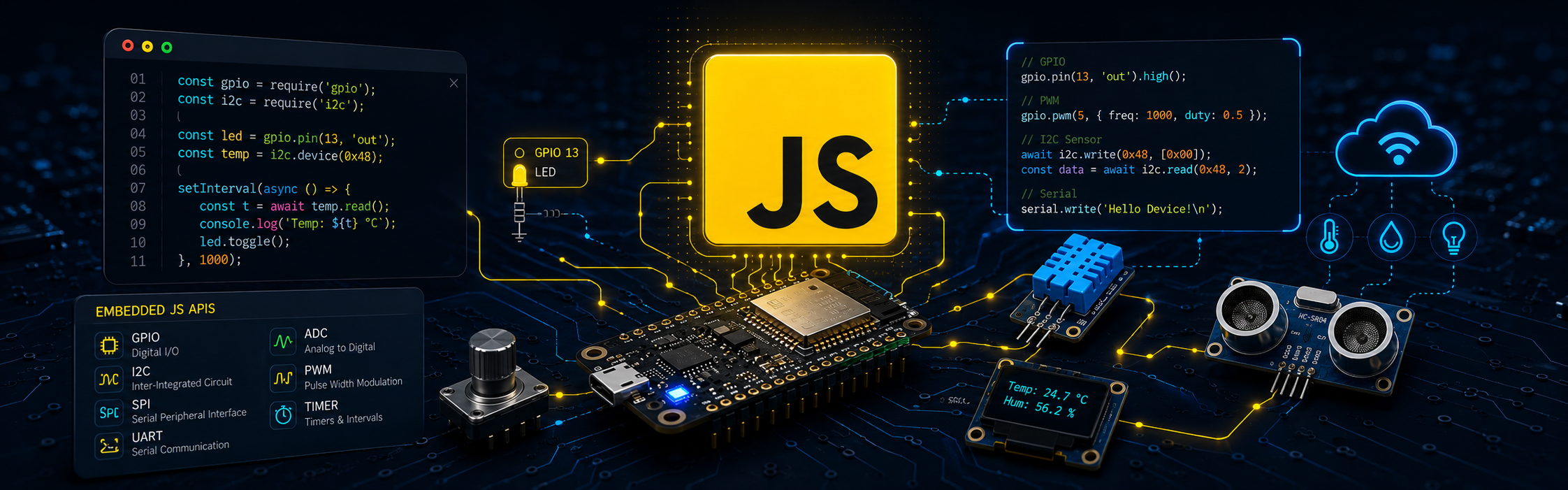
JavaScript em Microcontroladores: Espruino, Microvium, Moddable XS, mJS e JerryScriptJavaScript em Microcontroladores: Espruino, Microvium, Moddable XS, mJS e JerryScript
Entenda como usar JavaScript em microcontroladores com engines como Espruino, Microvium, Moddable SDK com XS Engine, mJS da Cesanta e JerryScript. O artigo compara vantagens, limitações, consumo de memória, integração
Sistemas de Arquivos em Microcontroladores: LittleFS, SPIFFS e SD Card no STM32N6Sistemas de Arquivos em Microcontroladores: LittleFS, SPIFFS e SD Card no STM32N6
sistemas de arquivos para microcontroladores, LittleFS, SPIFFS, FATFS, SD Card, STM32N6, FreeRTOS, Flash externa, SPI Flash, QSPI, OctoSPI, sistemas embarcados, firmware em C, armazenamento em microcontroladores, logs em SD Card,
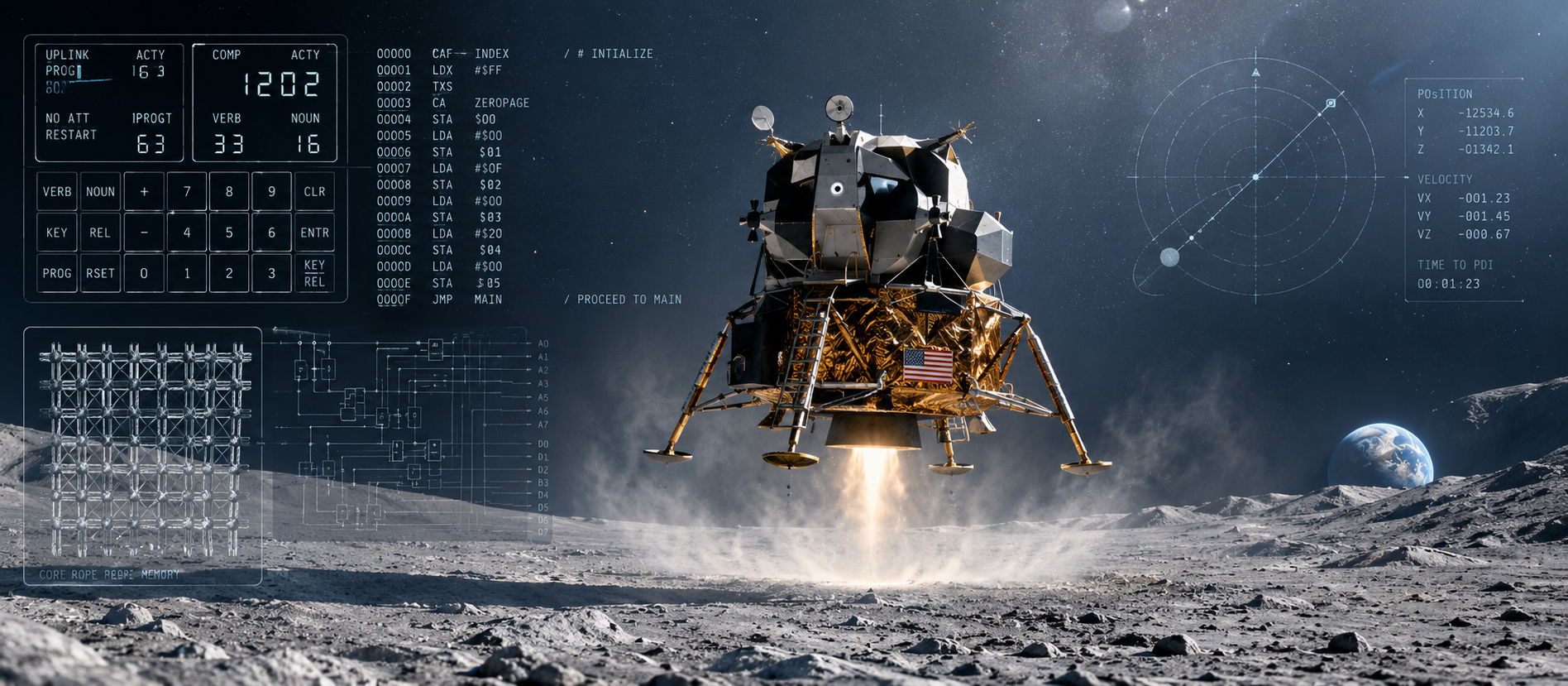
Apollo Guidance Computer: o software embarcado que levou a humanidade à LuaApollo Guidance Computer: o software embarcado que levou a humanidade à Lua
Conheça a história do Apollo Guidance Computer, o computador embarcado que ajudou a levar o homem à Lua. O artigo explica como limitações extremas de memória, processamento e energia moldaram
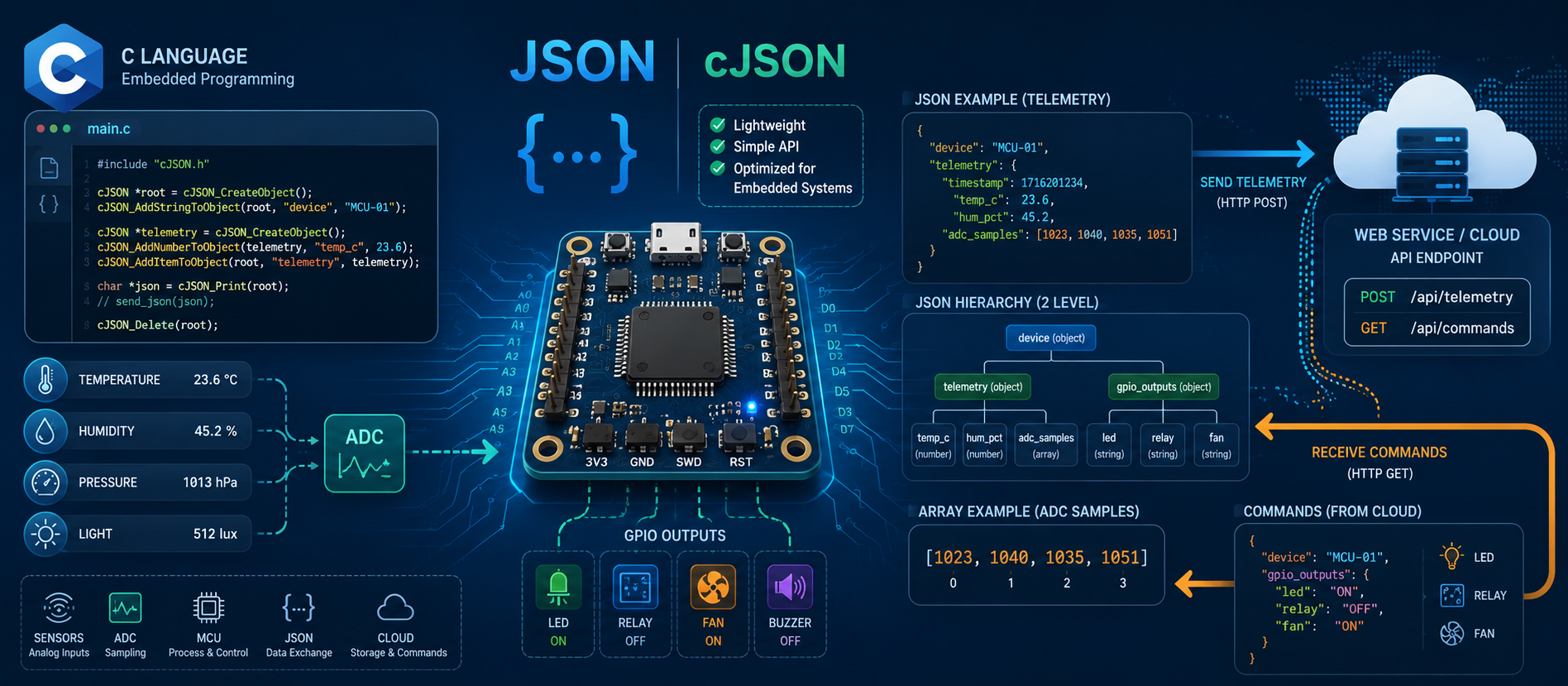
Usando JSON e cJSON em MicrocontroladoresUsando JSON e cJSON em Microcontroladores
Aprenda como usar JSON e a biblioteca cJSON em microcontroladores com linguagem C. Neste tutorial didático, mostramos como criar objetos JSON, montar hierarquias de dois níveis, trabalhar com arrays, simular
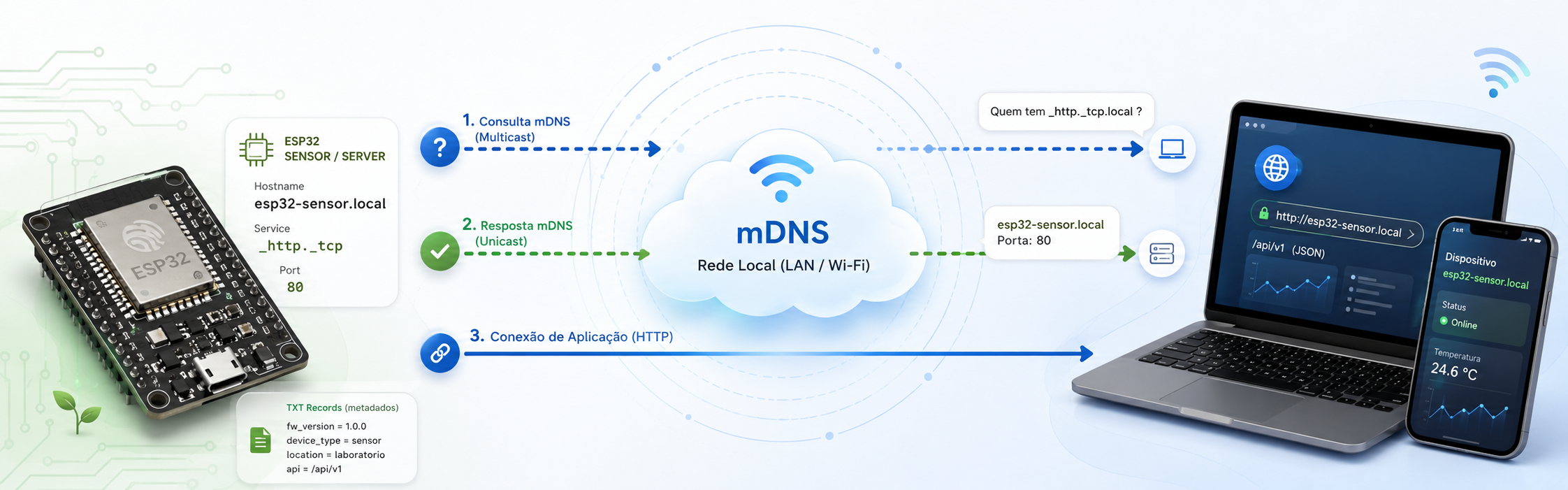
mDNS no ESP32 — tornando dispositivos IoT fáceis de encontrar na rede localmDNS no ESP32 — tornando dispositivos IoT fáceis de encontrar na rede local
Aprenda o que é mDNS, como ele funciona e como usá-lo no ESP32 com ESP-IDF para acessar dispositivos IoT por nomes como esp32-sensor.local. O artigo explica a diferença entre descoberta
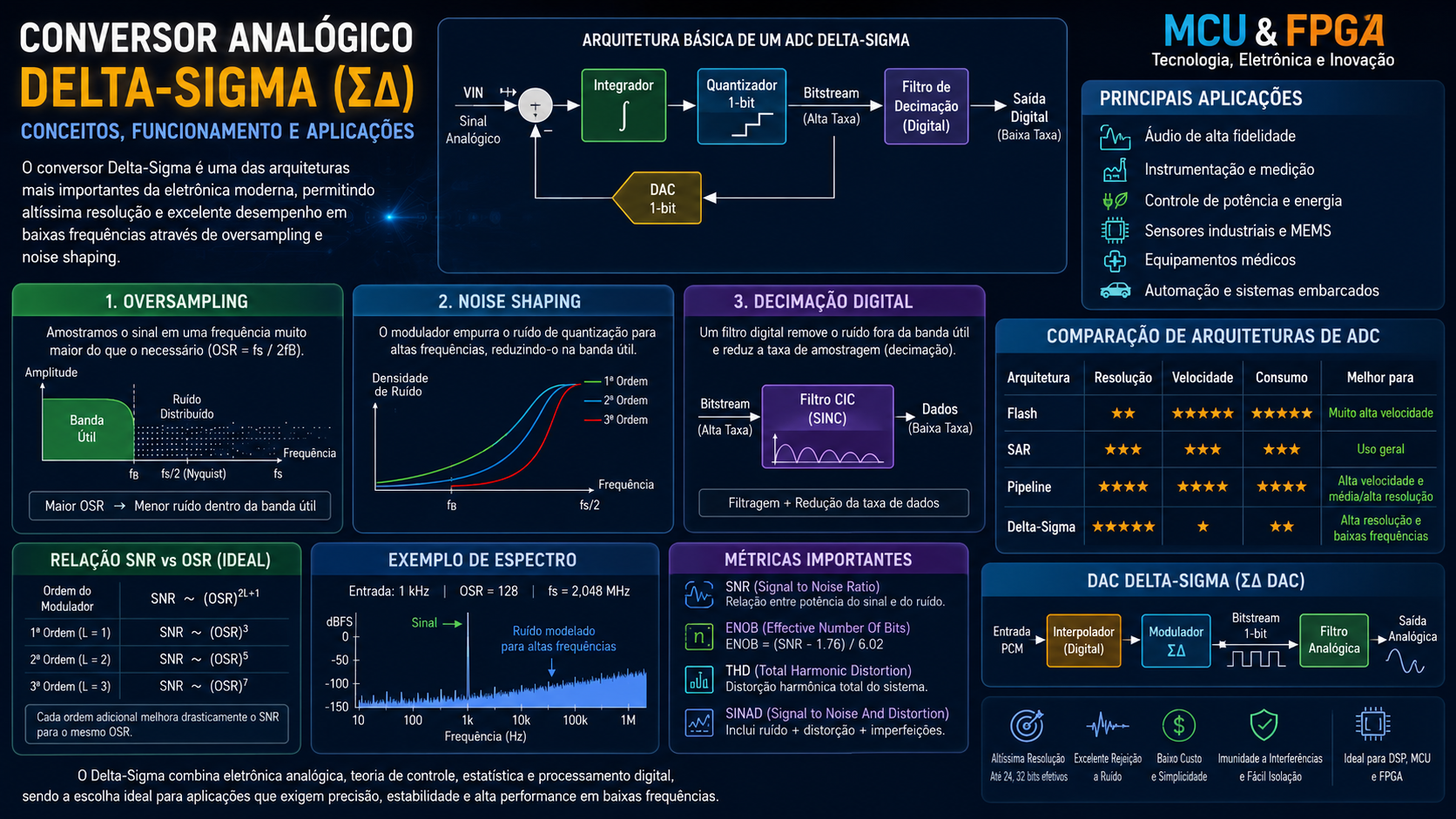
Conversor Analógico Delta-Sigma (ΔΣ ADC)Conversor Analógico Delta-Sigma (ΔΣ ADC)
Aprenda detalhadamente como funciona o conversor analógico Delta-Sigma (ΣΔ ADC), entendendo conceitos como oversampling, noise shaping, quantização, moduladores Sigma-Delta, filtros CIC, decimação, SNR, ENOB e DSD. Veja comparações entre ADC