
Entenda como funcionam os protocolos auto-sincronizáveis SLIP, COBS e CBOR em sistemas embarcados. Veja exemplos em C, comparações técnicas, boas e más escolhas de engenharia e descubra como projetar comunicações
Mês: janeiro 2026
Dimensionamento de Pilha (Stack) e Heap no FreeRTOSDimensionamento de Pilha (Stack) e Heap no FreeRTOS
Aprenda como dimensionar corretamente stack e heap no FreeRTOS com explicações detalhadas sobre TCB, heap e stack, cálculos práticos, fórmulas, exemplos em C e boas práticas profissionais. Este guia técnico

Filtro Digital com Séries de Taylor e Cepstrum para Detecção de Assobio em RP2040Filtro Digital com Séries de Taylor e Cepstrum para Detecção de Assobio em RP2040
Aprenda a projetar um filtro digital para separar a frequência fundamental e as harmônicas de um assobio humano utilizando Séries de Taylor em microcontroladores. Este artigo técnico e didático apresenta,
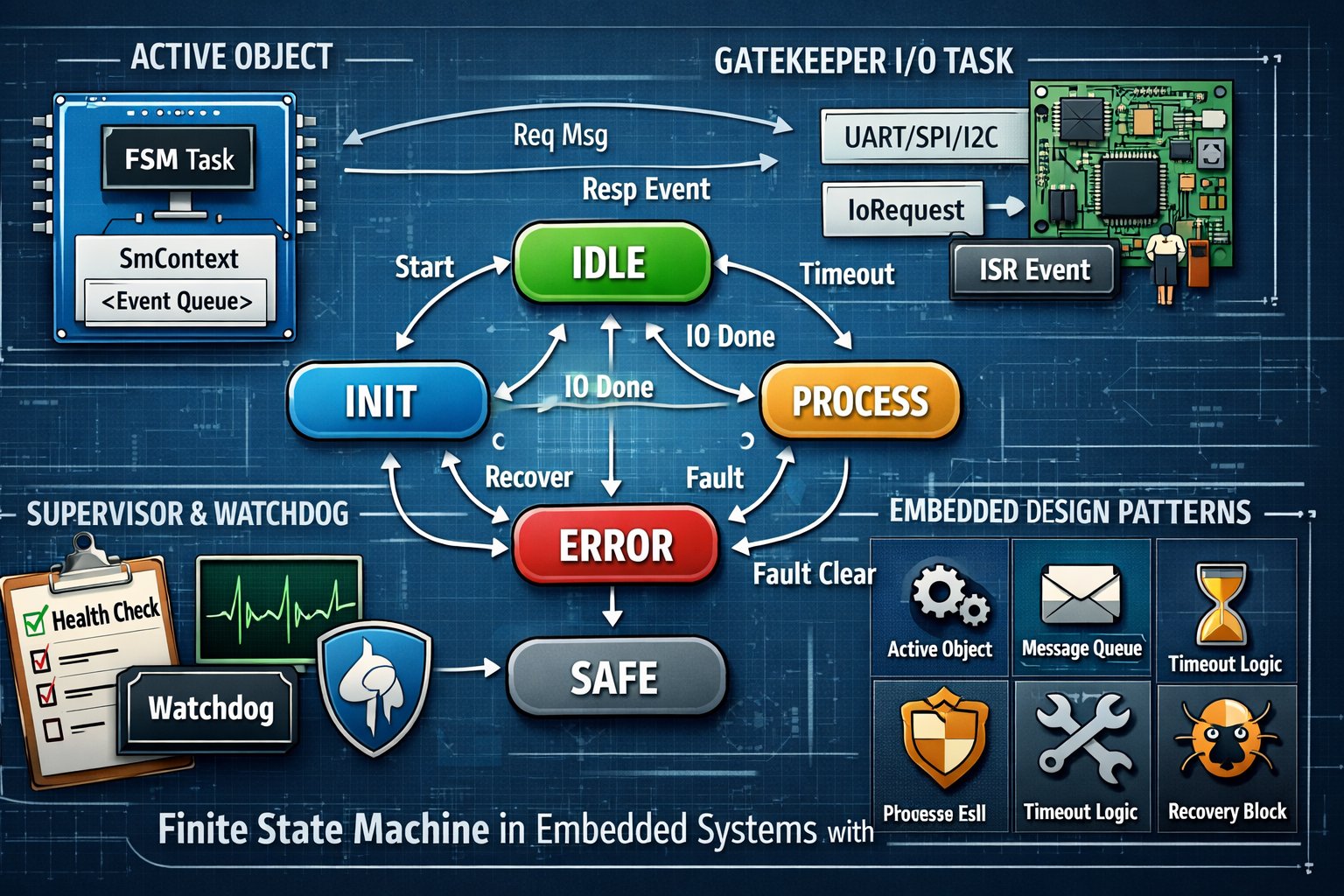
Máquina de Estados em Sistemas Embarcados com FreeRTOS: Projeto Cíclico, Recuperável e Orientado a EventosMáquina de Estados em Sistemas Embarcados com FreeRTOS: Projeto Cíclico, Recuperável e Orientado a Eventos
Aprenda como projetar Máquinas de Estados robustas para sistemas embarcados usando FreeRTOS. Este artigo apresenta uma abordagem prática e profissional para construir firmware cíclico e recuperável, utilizando duas threads cooperativas,
Zephyr no ESP32: ADC Contínuo com DMA, VAD e Processamento de Sinais em Tempo RealZephyr no ESP32: ADC Contínuo com DMA, VAD e Processamento de Sinais em Tempo Real
Aprenda como usar o Zephyr OS no ESP32 para implementar leitura contínua do ADC com DMA, detecção de atividade de voz (VAD) e processamento de sinais em tempo real. Este

Zephyr RTOS: Como Projetar Comunicação Serial Robusta com UART, SPI e I²CZephyr RTOS: Como Projetar Comunicação Serial Robusta com UART, SPI e I²C
Aprenda como projetar comunicação serial robusta no Zephyr RTOS usando UART, SPI e I²C. Este artigo mostra, de forma didática e crítica, como configurar a UART no Zephyr, estruturar buffers,
Como Criar Tarefas e Soft Timers no FreeRTOS: Guia Prático e Didático para Sistemas EmbarcadosComo Criar Tarefas e Soft Timers no FreeRTOS: Guia Prático e Didático para Sistemas Embarcados
Este artigo apresenta um guia completo e didático sobre como criar e gerenciar tarefas e soft timers no FreeRTOS, explicando conceitos fundamentais de escalonamento, prioridades, dimensionamento de stack e comunicação
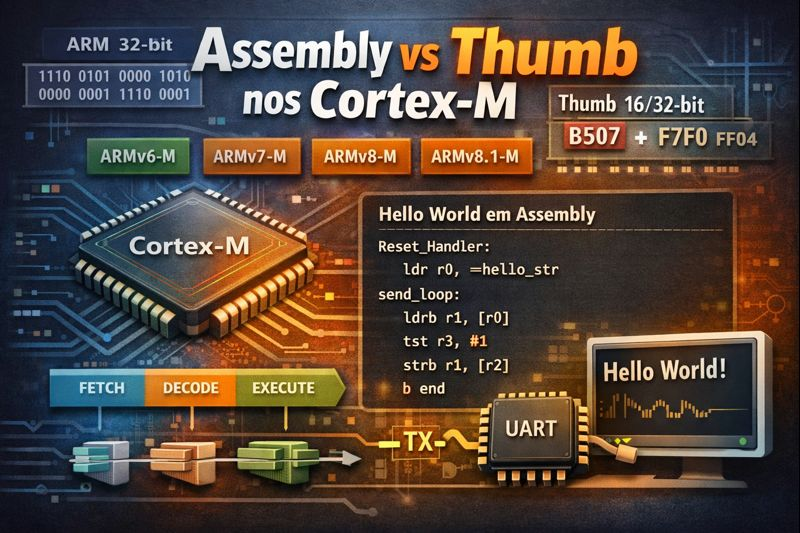
Assembly ARM vs Thumb: Arquitetura de Instruções nos Cortex-M e Exemplo Prático em AssemblyAssembly ARM vs Thumb: Arquitetura de Instruções nos Cortex-M e Exemplo Prático em Assembly
Entenda de forma clara e técnica as diferenças entre o assembly ARM clássico e o Thumb, com foco nos microcontroladores Cortex-M. O artigo explica a evolução das arquiteturas ARMv6-M, ARMv7-M,
Filas, Flags, Mutexes, Notificações e Eventos no Zephyr RTOSFilas, Flags, Mutexes, Notificações e Eventos no Zephyr RTOS
Aprenda em profundidade como usar queues, flags, semáforos, mutexes, eventos e notificações no Zephyr RTOS. Um guia didático e prático com exemplos em C, comparativos arquiteturais e boas práticas para
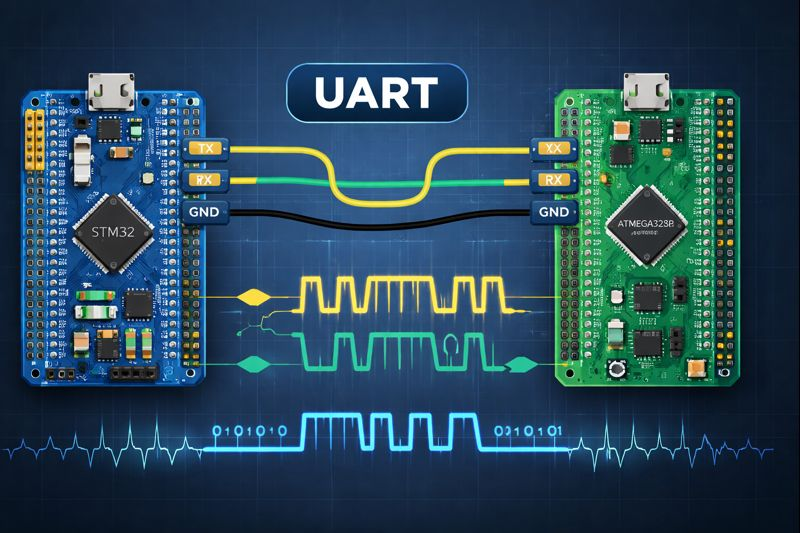
UART não é Porta Serial: Como Projetar Protocolos Robustos em Sistemas EmbarcadosUART não é Porta Serial: Como Projetar Protocolos Robustos em Sistemas Embarcados
UART é frequentemente tratada como uma simples porta serial para uso com printf e terminais, mas essa abordagem falha rapidamente em sistemas embarcados reais. Este artigo apresenta uma visão técnica