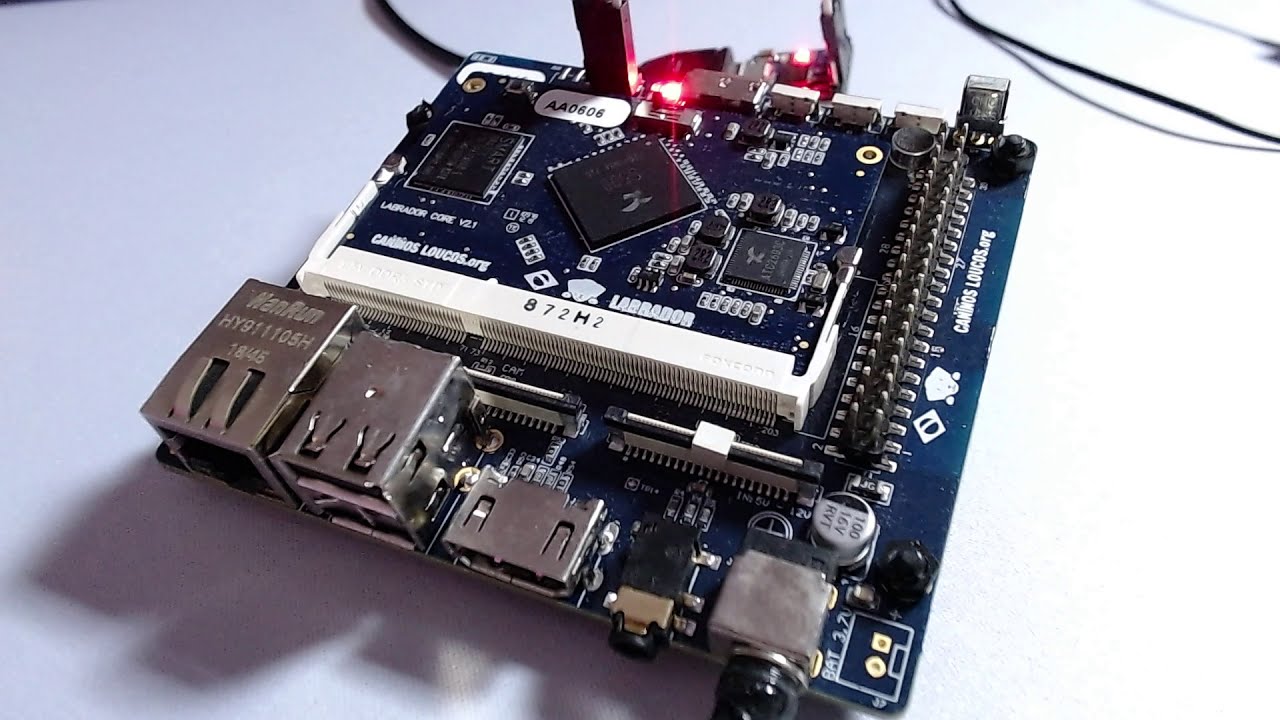
A Labrador, desenvolvida pelo projeto Caninos Loucos, é um Single-Board Computer (SBC) nacional projetado para ser uma plataforma de alto desempenho, aberta e acessível, destinada a aplicações em IoT (Internet das Coisas), automação, robótica e ensino de sistemas embarcados. Seu design compacto esconde um conjunto robusto de recursos, permitindo que tanto iniciantes quanto desenvolvedores experientes explorem ao máximo o potencial do hardware.
No núcleo da Labrador encontra-se um processador ARM Cortex-A7 de baixo consumo e alto desempenho, acompanhado de 512 MB de RAM DDR3 e armazenamento interno eMMC de 4 GB, expansível via cartão microSD. A placa oferece conectividade flexível com Ethernet, Wi-Fi e Bluetooth, além de portas USB para periféricos e interface HDMI para saída de vídeo.
No quesito expansão, a Labrador traz um header de 40 pinos compatível com múltiplos protocolos, incluindo GPIOs, UART, I²C, SPI, PWM e entradas/saídas digitais, permitindo interação direta com sensores, atuadores e outros módulos. Ao todo, são 40 pinos, dos quais 12 são dedicados à alimentação (8 GND, 2×3,3 V e 2×5 V) e os demais configuráveis para diferentes funções. Os GPIOs seguem um padrão de nomenclatura letra + número (ex.: C26), agrupados em blocos gerenciados por chips lógicos individuais (gpiochip0, gpiochip1, etc.), proporcionando flexibilidade e controle refinado.
O Caninos Loucos é uma iniciativa colaborativa brasileira dedicada a criar soluções de hardware aberto adaptadas à realidade local. A Labrador reflete essa missão ao oferecer um ecossistema de hardware e software que facilita desde a instalação do sistema operacional até o desenvolvimento de projetos avançados, com suporte nativo a Python e bibliotecas como gpiod e caninos-sdk.
Este artigo irá explorar a placa Labrador em profundidade, abordando suas especificações técnicas, arquitetura de software e um exemplo prático de desenvolvimento em Python para controle de periféricos. Também serão apresentadas estratégias de otimização SEO para ampliar a visibilidade de projetos e tutoriais relacionados a esta plataforma.
Arquitetura de Software da Labrador
A arquitetura de software da placa Labrador foi projetada para oferecer flexibilidade, facilidade de uso e compatibilidade com ferramentas modernas de desenvolvimento. Baseada em Linux Debian 11 customizado, a distribuição oficial da Caninos Loucos já vem preparada para o uso educacional e de prototipagem, reduzindo a curva de aprendizado para novos usuários e garantindo robustez para aplicações mais avançadas.
Camada de Firmware
O firmware embarcado na Labrador é responsável pela inicialização do hardware, configuração de periféricos e carregamento do sistema operacional. Essa camada interage diretamente com os recursos do SoC ARM Cortex-A7, preparando o ambiente para que as bibliotecas de nível mais alto possam controlar GPIOs, interfaces seriais e módulos de comunicação.
Sistema Operacional e Desenvolvimento
O sistema operacional oficial inclui suporte completo a Python 3 e pip3, permitindo a instalação rápida de bibliotecas essenciais, como:
- gpiod – Controle de GPIOs em dispositivos Linux com suporte a interfaces digitais genéricas.
- caninos-sdk – Biblioteca oficial da Caninos Loucos, simplificando o acesso aos recursos da Labrador.
- OpenCV – Processamento e análise de imagens em tempo real.
- pylibi2c – Comunicação via barramento I²C de forma simplificada.
A instalação dessas bibliotecas é feita diretamente no terminal, com comandos simples como:
sudo pip3 install gpiod caninos-sdk opencv-python
Protocolos de Comunicação
A Labrador oferece suporte nativo a protocolos amplamente utilizados em sistemas embarcados:
- UART – Para comunicação serial assíncrona, útil em debug e troca de dados com microcontroladores externos.
- I²C – Para conectar múltiplos sensores e módulos usando apenas dois fios (SDA e SCL).
- SPI – Comunicação síncrona de alta velocidade com displays, memórias flash e outros periféricos.
- BLE (Bluetooth Low Energy) – Comunicação sem fio de baixo consumo, ideal para dispositivos móveis e IoT.
Estratégia de Controle de Energia
Embora projetada para funcionar continuamente, a Labrador adota práticas de economia de energia inspiradas em dispositivos móveis. O sistema operacional suporta modos de suspensão, desligamento de interfaces inativas e ajustes de frequência do processador conforme a carga de trabalho. Essa abordagem é essencial para projetos IoT alimentados por baterias ou fontes limitadas de energia.
Com essa base de software, a Labrador está pronta para receber e executar aplicações de controle, automação e monitoramento, mantendo um equilíbrio entre desempenho, consumo de energia e facilidade de programação.
Ótimo, vamos então para a Seção 4 – Desenvolvimento de um aplicativo Python para a Labrador.
Desenvolvimento de um Aplicativo Python para a Labrador
Uma das principais vantagens da Labrador é seu suporte nativo a Python 3, o que permite o desenvolvimento rápido e direto de aplicações para controle de periféricos, leitura de sensores e integração com sistemas IoT. Nesta seção, vamos criar um exemplo prático que acende e apaga um LED conectado à placa, utilizando tanto a conexão local quanto a possibilidade de adaptação para controle via Bluetooth Low Energy (BLE).
Dependências e Ambiente
Antes de iniciar a programação, é necessário garantir que o Python 3 e o pip3 estejam atualizados e que as bibliotecas essenciais estejam instaladas:
sudo apt update && sudo apt upgrade
sudo apt install python3 python3-pip
sudo pip3 install gpiod caninos-sdk
Dica: Se a comunicação for via BLE, bibliotecas como
bleakpodem ser instaladas compip install bleak.
Estrutura de Diretórios
Para manter a organização, recomenda-se criar um diretório de projeto com a seguinte estrutura:
projeto_labrador/
│
├── src/
│ ├── controle_led.py
│
├── assets/ # Imagens, documentação ou diagramas
└── README.md
Código Exemplo – Controle de LED via GPIO
A seguir, um exemplo completo que acende e apaga um LED conectado ao pino GPIO 17:
import gpiod
import time
# Configuração do chip GPIO
chip = gpiod.Chip('gpiochip0')
# Obtém controle sobre o pino 17
led_line = chip.get_line(17)
led_line.request(consumer='led', type=gpiod.LINE_REQ_DIR_OUT)
try:
while True:
led_line.set_value(1) # Liga o LED
time.sleep(1)
led_line.set_value(0) # Desliga o LED
time.sleep(1)
except KeyboardInterrupt:
print("\nEncerrando execução e liberando recursos...")
chip.close()
Esse código acende e apaga o LED em intervalos de 1 segundo. Para adaptar para controle via BLE, basta criar uma função de callback que altere o valor do pino conforme os comandos recebidos pelo módulo Bluetooth.
Extensão para Controle via BLE
Com o módulo BLE da Labrador, é possível receber comandos de um aplicativo no celular. Um exemplo de integração seria criar um serviço BLE que, ao receber o valor "on", acende o LED, e ao receber "off", apaga. Isso amplia as possibilidades de automação e controle remoto, mantendo a simplicidade do Python.