
Aprenda a utilizar o GDB de forma profissional para depurar microcontroladores STM32 com OpenOCD e ST-LINK. Este guia prático apresenta comandos essenciais para breakpoints, watchpoints, inspeção de registradores Cortex-M, análise
Autor: Carlos Delfino
Sou um eterno aprendiz
Estudante de eletrônica Analógica, curioso sobre a Física dos Semicondutores.
Professor de Eletrônica básica
Professor de Lógica de Programação
Professor de Arquitetura e programação de microcontroladores
Embarcatecher

BNO055: Guia Completo de Orientação Absoluta, I2C, Calibração e Driver Robusto em CBNO055: Guia Completo de Orientação Absoluta, I2C, Calibração e Driver Robusto em C
Aprenda em detalhes como utilizar o sensor BNO055 para orientação absoluta com fusão sensorial interna. Entenda quaternions, ângulos de Euler, calibração, problemas reais no protocolo I2C, clock stretching, compatibilidade com

MPU6050 em projetos reais: do “dado cru” ao ângulo (e preparando terreno para o DMP)MPU6050 em projetos reais: do “dado cru” ao ângulo (e preparando terreno para o DMP)
Aprenda como usar o MPU6050 de forma profissional em projetos embarcados utilizando giroscópio, acelerômetro e o DMP interno. Este guia técnico explica passo a passo como configurar registradores, converter dados
FreeRTOS: Uso Correto de Queue com Múltiplos ConsumidoresFreeRTOS: Uso Correto de Queue com Múltiplos Consumidores
Aprenda como usar corretamente Queue com múltiplos consumidores no FreeRTOS. Entenda o impacto do escalonador, riscos de starvation, perda de eventos e quando usar alternativas como Event Groups e Task
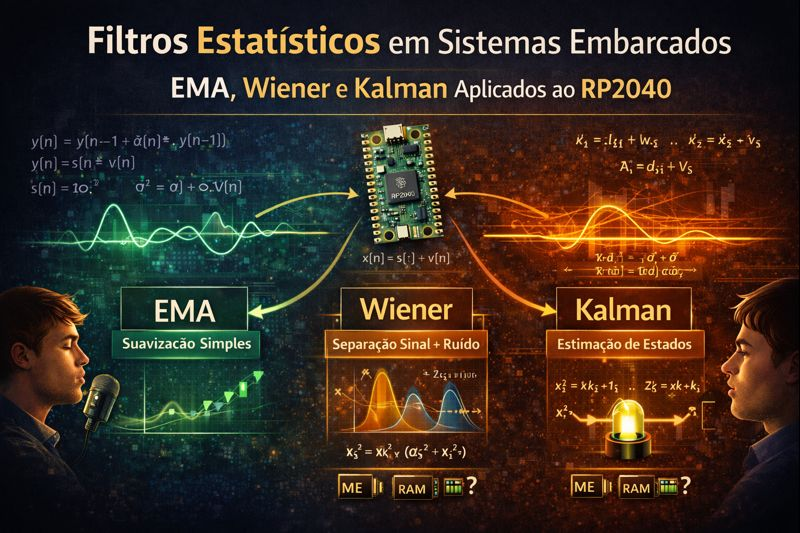
Filtros Estatísticos em Sistemas Embarcados: EMA, Wiener e Kalman Aplicados ao RP2040Filtros Estatísticos em Sistemas Embarcados: EMA, Wiener e Kalman Aplicados ao RP2040
Este artigo apresenta uma abordagem didática e aprofundada sobre o uso de filtros estatísticos em sistemas embarcados, explorando a média móvel exponencial (EMA), o filtro de Wiener e o filtro

Containerização em Sistemas Embarcados com Zephyr OSContainerização em Sistemas Embarcados com Zephyr OS
Entenda como funciona a containerização no Zephyr OS e como o conceito de containers foi adaptado para sistemas embarcados e dispositivos IoT. Descubra como o Zephyr implementa isolamento de aplicações

Filtro notch discreto (notch IIR) e média sincronizada (sync averaging)Filtro notch discreto (notch IIR) e média sincronizada (sync averaging)
Fechando a ideia: o notch discreto e a média sincronizada resolvem problemas parecidos (melhorar a qualidade do sinal), mas por “mecanismos” bem diferentes, e isso muda totalmente quando cada um

OTA, FOTA e SOTA em IoT: Diferenças, Riscos e Boas Práticas em Projetos ReaisOTA, FOTA e SOTA em IoT: Diferenças, Riscos e Boas Práticas em Projetos Reais
OTA, FOTA e SOTA são pilares fundamentais para a manutenção e evolução de dispositivos IoT modernos. Este artigo apresenta uma análise técnica e aprofundada sobre atualizações Over-The-Air, explicando as diferenças
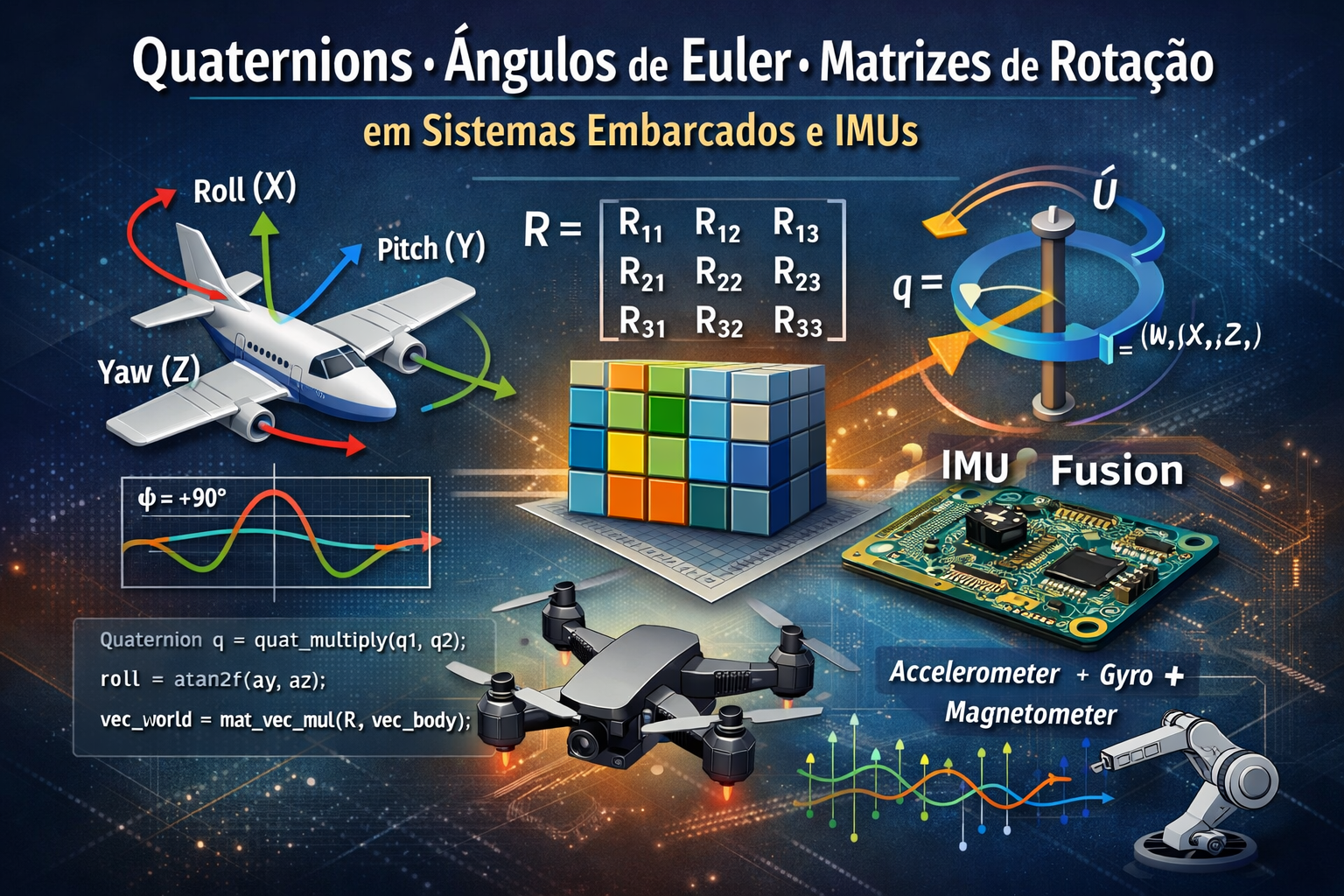
Quaternions, Ângulos de Euler e Matrizes de Rotação: Guia Completo para Sistemas Embarcados e IMUsQuaternions, Ângulos de Euler e Matrizes de Rotação: Guia Completo para Sistemas Embarcados e IMUs
Aprenda de forma didática e aprofundada como funcionam quaternions, ângulos de Euler e matrizes de rotação aplicados a sistemas embarcados com IMUs. Entenda as diferenças matemáticas, o problema do gimbal

Filtragem de ruído em leituras ADC em microcontroladores (ATmega e ESP32) com exemplos em CFiltragem de ruído em leituras ADC em microcontroladores (ATmega e ESP32) com exemplos em C
Descubra como reduzir ruídos em leituras de ADC utilizando filtros digitais implementados em linguagem C para microcontroladores ATmega e ESP32. Este conteúdo técnico apresenta abordagens práticas como média móvel (FIR),