Seção 4 — Alarmes 1201 e 1202: o software sob pressão durante o pouso da Apollo 11
Minutos antes do pouso na Lua, a missão Apollo 11 entrou em um dos momentos mais críticos da história da exploração espacial. Dentro do módulo lunar Eagle, Neil Armstrong e Buzz Aldrin acompanhavam a descida enquanto a superfície lunar se aproximava. Ao mesmo tempo, no controle da missão em Houston, engenheiros analisavam dados, conferiam telemetria e avaliavam se a alunissagem poderia continuar com segurança.
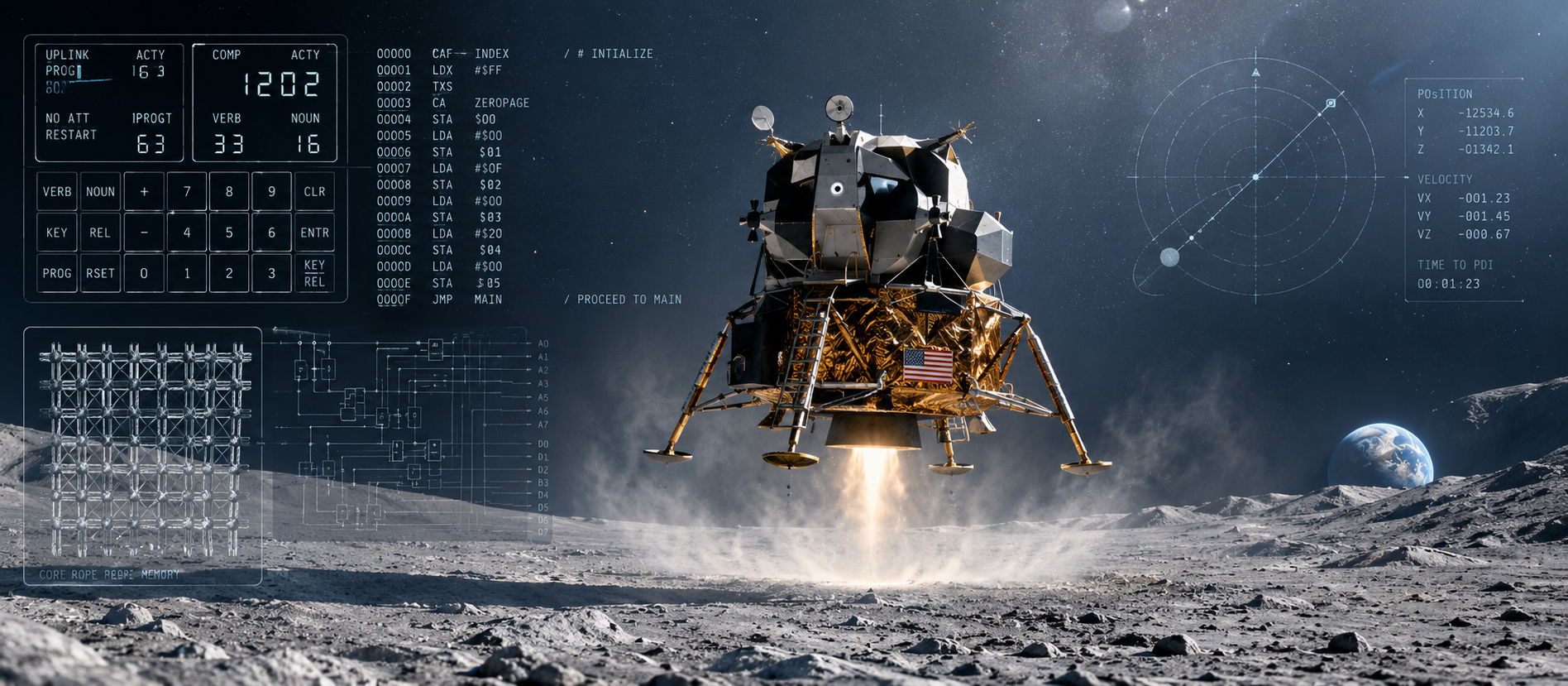
Foi nesse instante que o computador de bordo começou a emitir alarmes inesperados: 1202 e, pouco depois, 1201. Para os astronautas, aqueles códigos apareciam no visor da interface DSKY em meio a uma fase extremamente delicada. Para a equipe em solo, eles indicavam que algo precisava ser interpretado rapidamente. A missão não podia simplesmente parar para uma longa análise, porque o módulo lunar consumia combustível e a janela de decisão era curta.
O problema estava relacionado a uma sobrecarga de processamento no Apollo Guidance Computer. Durante a descida, o computador precisava lidar com tarefas críticas: controle do motor de descida, cálculo de trajetória, atualização de navegação, processamento de dados de sensores, comandos dos astronautas e comunicação com os sistemas do módulo lunar. No entanto, uma carga adicional indesejada surgiu a partir do radar de acoplamento, que permanecia ativo e enviava dados ao sistema em um momento em que não era necessário para o pouso.
Essa carga extra consumia ciclos de processamento de um computador que já trabalhava próximo ao limite. Em um sistema mal projetado, esse tipo de situação poderia levar a travamento, perda de resposta, bloqueio de tarefas críticas ou comportamento imprevisível. Mas o AGC havia sido projetado com uma ideia essencial: quando não fosse possível fazer tudo, ele deveria preservar o que era mais importante.
A resposta do software foi notável. Em vez de simplesmente colapsar diante da sobrecarga, o executivo do AGC reiniciou tarefas de forma controlada, descartou atividades menos prioritárias e manteve em execução aquilo que era essencial para a missão. As funções críticas relacionadas à orientação, navegação e controle continuaram operando. O computador sinalizou que estava sobrecarregado, mas também mostrou que ainda estava preservando o núcleo funcional necessário para a descida.
Esse comportamento expressa uma das lições mais importantes de sistemas embarcados críticos: um sistema confiável não é aquele que nunca encontra problemas, mas aquele que sabe o que fazer quando eles aparecem. A sobrecarga não foi ignorada. Ela foi detectada, comunicada e tratada. O AGC não tentou executar todas as tarefas a qualquer custo. Ele aplicou prioridade.
Em linguagem moderna, podemos interpretar esse episódio como um exemplo de degradação controlada. O sistema reduziu seu escopo operacional momentâneo, manteve as funções vitais e descartou o que não era essencial. Esse conceito é extremamente importante em sistemas de tempo real. Quando os recursos são finitos, a arquitetura precisa saber diferenciar o indispensável do secundário.
Essa é uma diferença fundamental entre sistemas comuns e sistemas críticos. Em uma aplicação convencional, uma sobrecarga pode gerar atraso, travamento momentâneo ou uma tela congelada. Em um sistema embarcado controlando um veículo, um motor, uma fonte chaveada, um equipamento médico ou uma missão espacial, a sobrecarga precisa ser prevista como possibilidade real. O sistema deve ter mecanismos para responder, sinalizar o problema e continuar operando dentro do que for seguro.
No caso da Apollo 11, a equipe em solo precisou interpretar rapidamente os alarmes. O jovem engenheiro Steve Bales, com apoio de especialistas como Jack Garman, reconheceu que os códigos indicavam sobrecarga do executivo, mas não perda das funções críticas. A decisão foi permitir que a descida continuasse. Essa decisão só foi possível porque os alarmes tinham significado técnico conhecido e porque o comportamento do sistema havia sido estudado anteriormente.
Esse detalhe é importante. O software não salvou a missão sozinho, isolado dos humanos. A missão foi preservada pela combinação entre arquitetura resiliente, treinamento, documentação, simulação e uma equipe capaz de interpretar rapidamente o estado do sistema. Engenharia crítica raramente depende de um único elemento heroico. Ela depende de camadas de preparação.
A equipe liderada por Margaret Hamilton havia projetado o software considerando que o inesperado aconteceria. Essa mentalidade é profundamente diferente da ideia de escrever código apenas para o caminho feliz, isto é, para o cenário em que todos os sensores funcionam, todas as entradas são válidas, todos os tempos são respeitados e nenhum subsistema se comporta de forma estranha. No mundo real, especialmente em sistemas embarcados, o caminho feliz é apenas uma das possibilidades.
O episódio dos alarmes 1201 e 1202 mostra que a arquitetura de software deve incluir critérios explícitos de prioridade. Nem toda tarefa tem a mesma importância. Nem todo dado precisa ser processado imediatamente. Nem toda falha exige parada total. Em muitos sistemas, o mais importante é preservar um núcleo mínimo de operação segura.
Essa ideia aparece hoje em muitos projetos embarcados. Em um firmware com RTOS, tarefas podem ter prioridades diferentes. Em um sistema de controle, loops críticos precisam ser protegidos contra atrasos. Em um equipamento conectado, uma falha na comunicação com a nuvem não deve interromper a função local essencial. Em um drone, uma rotina de telemetria não pode ter precedência sobre estabilização de voo. Em um inversor, uma interface de usuário não pode comprometer a proteção contra sobrecorrente.
O AGC nos ensina que a pergunta correta não é apenas “meu sistema funciona?”. A pergunta mais profunda é: quando meu sistema estiver sobrecarregado, o que ele vai deixar de fazer primeiro? Se a resposta não estiver clara na arquitetura, então a prioridade real será decidida pelo acaso, pelo escalonador, pelo tempo de execução, por uma interrupção inesperada ou por uma disputa de recurso mal projetada.
Essa é uma lição direta para o desenvolvimento moderno. Muitos sistemas atuais têm processadores rápidos, memória abundante e bibliotecas sofisticadas, mas continuam vulneráveis porque não possuem uma arquitetura clara de falha. Eles funcionam bem em demonstrações, mas se tornam frágeis sob carga, com sensores ruidosos, redes instáveis, entradas inválidas ou múltiplos eventos simultâneos.
O pouso da Apollo 11 não foi apenas um triunfo da exploração espacial. Foi também uma demonstração histórica de engenharia de software resiliente. O computador não tinha muitos recursos, mas tinha uma arquitetura pensada para preservar o essencial. E, naquele momento, isso fez toda a diferença.
Na próxima seção, vamos fechar a parte técnica da série examinando como a NASA, o MIT Instrumentation Laboratory, os astronautas e as equipes de engenharia conseguiram validar um sistema tão complexo antes de enviá-lo para um ambiente onde ninguém jamais havia pousado.
