Visão geral: por que a indústria padronizou 0–10 V e 4–20 mA
Em automação industrial, o “problema real” não é só medir uma grandeza (pressão, nível, vazão, temperatura), e sim transportar essa informação com confiabilidade por cabos longos, passando perto de motores, inversores de frequência, contatores e ambientes com aterramento imperfeito. Por isso, o setor convergiu para dois padrões analógicos simples, baratos e robustos: tensão (tipicamente 0–10 V) e corrente (tipicamente 4–20 mA). Ambos representam a mesma ideia: um sensor transforma uma variável física em um sinal elétrico proporcional; a diferença está em como esse sinal “sobrevive” ao mundo industrial.
O padrão 0–10 V é muito comum quando as distâncias são moderadas, o cabeamento é bem controlado e o custo/complexidade precisa ser mínimo. Ele é intuitivo: a variável medida vira uma tensão proporcional na entrada analógica do CLP/DAQ. A relação básica de escalonamento (linear) é:
\[
y = y_{\min} + \frac{(V – V_{\min})}{(V_{\max}-V_{\min})},(y_{\max}-y_{\min})
\]
Para 0–10 V, fica:
\[
y = y_{\min} + \frac{V}{10},(y_{\max}-y_{\min})
\]
Já o padrão 4–20 mA nasceu para vencer o que “mata” sinais de tensão no campo: queda de tensão no cabo, variações de resistência de contato, ruído acoplado e diferenças de referência de terra. Em um loop de corrente, o receptor não “confia” tanto em uma tensão absoluta; ele mede a corrente, e a corrente é a mesma ao longo de todo o circuito em série (pela própria natureza do loop), desde que o transmissor tenha tensão de alimentação suficiente para manter a conformidade. O escalonamento típico é:
\[
y = y_{\min} + \frac{(I-4,\text{mA})}{16,\text{mA}},(y_{\max}-y_{\min})
\]
O “4 mA” (e não 0 mA) é intencional: é o chamado zero vivo. Assim, 0 mA pode significar falha (fio rompido, transmissor sem alimentação), enquanto 4 mA significa “medindo zero da grandeza, mas o circuito está vivo”. Esse detalhe sozinho reduz diagnósticos ambíguos e melhora manutenção.
Na prática, a escolha vira um trade-off objetivo:
- 0–10 V tende a ser simples, barato, fácil de interfacear, porém mais sensível a ruído e a problemas de referência/aterramento em longas distâncias.
- 4–20 mA tende a ser mais robusto para cabos longos e ambientes agressivos, e ainda oferece diagnóstico de falha via “zero vivo”, ao custo de exigir loop, alimentação e resistor de carga (burden) adequados.
Observação importante (para conectar com arquitetura de sistemas reais): a indústria adota esses padrões porque eles reduzem risco sistêmico e tornam o comportamento mais previsível em campo — uma lógica muito alinhada à mentalidade de projeto de sistemas embarcados/tempo real, onde decisões de arquitetura existem para otimizar confiabilidade sob restrições práticas.
Padrão 0–10 V em detalhe técnico (vantagens, limites e matemática do erro)
O padrão 0–10 V representa a variável medida como uma tensão proporcional aplicada à entrada analógica do sistema de aquisição (CLP, módulo de I/O, microcontrolador). Do ponto de vista elétrico, isso significa que o sensor funciona como uma fonte de tensão (idealmente) e o equipamento de leitura como uma carga de alta impedância. Quanto maior a impedância de entrada, menor a corrente drenada do sensor e menor o erro introduzido.
Modelo elétrico simplificado
Na prática, o sensor não é uma fonte ideal: ele pode ser modelado como uma fonte de tensão \(V_s\) em série com uma resistência interna \(R_s\). O cabo adiciona uma resistência \(R_c\) e a entrada do conversor A/D (ADC) possui uma impedância \(R_{in}\).
\[
V_{med} = V_s \cdot \frac{R_{in}}{R_s + R_c + R_{in}}
\]
Se \(R_{in} \gg (R_s + R_c)\), o termo tende a 1 e o erro é desprezível. Em ambientes industriais, módulos analógicos costumam ter impedâncias de entrada entre 100 kΩ e 1 MΩ, justamente para minimizar esse efeito. Já cabos longos, com seções pequenas, aumentam \(R_c\) e tornam o sistema mais sensível a erro.
Influência do ruído eletromagnético
Outro ponto crítico do 0–10 V é o acoplamento de ruído. Um campo eletromagnético variável (por exemplo, próximo a motores ou inversores de frequência) pode induzir uma tensão espúria no cabo. Como o sinal é uma tensão absoluta, qualquer interferência somada ao sinal aparece diretamente na medição:
\[
V_{ADC} = V_{sinal} + V_{ruído}
\]
Mesmo alguns poucos milivolts podem ser relevantes. Em um sensor escalado de 0–10 V para 0–100 bar, por exemplo, 10 mV equivalem a 0,1 bar. Em aplicações de precisão, isso não é desprezível.
Por isso, boas práticas são praticamente obrigatórias:
- uso de cabos blindados;
- referência de terra bem definida (sensor e receptor compartilham o mesmo GND);
- filtragem analógica simples, como um filtro RC passa-baixa antes do ADC.
O corte de um filtro RC típico é dado por:
\[
f_c = \frac{1}{2\pi RC}
\]
Esse filtro reduz ruído de alta frequência, mas introduz atraso de fase, algo que precisa ser considerado em sistemas de controle em malha fechada.
Resolução e relação com o ADC
Quando o sinal 0–10 V entra em um ADC de \(N\) bits, a menor variação detectável (LSB – Least Significant Bit) é:
\[
\Delta V = \frac{10\ \text{V}}{2^N}
\]
Por exemplo:
- ADC de 10 bits: \(\Delta V \approx 9{,}77\ \text{mV}\)
- ADC de 12 bits: \(\Delta V \approx 2{,}44\ \text{mV}\)
Esse valor define o limite teórico de resolução do sistema. Na prática, ruído, offset e erro de ganho costumam dominar antes mesmo do limite do ADC.
Quando 0–10 V faz sentido
O padrão 0–10 V é muito usado quando:
- as distâncias são curtas (painel ou máquina compacta);
- o ambiente eletromagnético é relativamente controlado;
- há necessidade de baixo custo e simplicidade;
- o sistema já possui entradas analógicas de alta impedância e boa referência de terra.
É exatamente nesses limites — ruído, referência de terra e distância — que o padrão 0–10 V começa a perder espaço para o 4–20 mA, que trata esses problemas de forma estrutural, e não apenas mitigativa.
Padrão 4–20 mA: robustez elétrica, “zero vivo” e imunidade a ruído
O padrão 4–20 mA foi adotado em larga escala porque resolve, de forma estrutural, problemas que no 0–10 V exigem cuidados adicionais. Aqui, a variável física não é representada por uma tensão absoluta, mas por uma corrente proporcional, que circula em um loop em série envolvendo transmissor, cabo, carga (burden) e fonte de alimentação. A grande vantagem é simples e poderosa: a corrente é a mesma em todos os pontos do loop, independentemente da resistência do cabo, desde que o transmissor tenha tensão suficiente para manter o regime.
Modelo elétrico do loop de corrente
Um loop típico pode ser modelado como:
- fonte de alimentação \(V_{loop}\),
- transmissor de corrente (sensor),
- resistência do cabo \(R_c\),
- resistência de carga \(R_b\) (burden resistor, onde a corrente é convertida em tensão),
- eventualmente dispositivos intermediários (isoladores, barreiras).
A tensão total necessária para o loop funcionar corretamente é:
\[
V_{loop} \ge V_{tx} + I \cdot (R_c + R_b)
\]
onde:
- \(V_{tx}\) é a tensão mínima de conformidade do transmissor,
- \(I\) é a corrente do loop (entre 4 e 20 mA).
Se essa condição for satisfeita, a corrente permanece correta, mesmo com variações de resistência do cabo, oxidação de contatos ou distâncias longas.
O conceito de “zero vivo” (4 mA)
Diferentemente de um sistema 0–20 mA, o uso de 4 mA como zero não é arbitrário. Ele resolve dois problemas fundamentais:
- Detecção de falhas
- 0 mA → fio rompido, transmissor sem alimentação ou falha grave.
- 4 mA → zero físico medido, sistema operando normalmente.
- Alimentação do próprio sensor
Em muitos casos, o transmissor é alimentado pelo próprio loop (loop-powered). Os 4 mA mínimos garantem energia suficiente para a eletrônica interna.
O escalonamento linear clássico é:
\[
y = y_{\min} + \frac{(I – 4,\text{mA})}{16,\text{mA}} \cdot (y_{\max} – y_{\min})
\]
Por exemplo, em um sensor de pressão de 0–100 bar:
- 4 mA → 0 bar
- 12 mA → 50 bar
- 20 mA → 100 bar
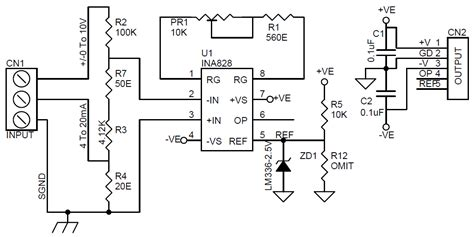
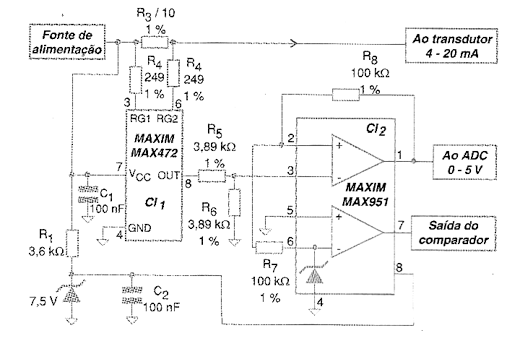
Conversão corrente → tensão (burden resistor)
Na maioria dos sistemas embarcados e CLPs, o ADC mede tensão, não corrente. Por isso, usa-se um resistor de carga \(R_b\) para converter corrente em tensão:
\[
V = I \cdot R_b
\]
Valores típicos:
- \(R_b = 250,\Omega\) → 4–20 mA vira 1–5 V
- \(R_b = 100,\Omega\) → 0,4–2 V
A escolha de \(R_b\) é crítica:
- valores altos aumentam a tensão disponível para o ADC,
- valores altos também aumentam a tensão exigida do loop (impactando a conformidade).
Imunidade a ruído: por que funciona melhor
Ruídos eletromagnéticos tendem a se manifestar como tensões induzidas no cabo. Em um sistema de corrente:
- pequenas tensões parasitas não alteram significativamente a corrente do loop;
- o transmissor “força” a corrente correta dentro de sua faixa de conformidade.
Matematicamente, um ruído de tensão \(V_n\) somado ao loop gera uma variação de corrente:
\[
\Delta I = \frac{V_n}{R_{total}}
\]
Como \(R_{total}\) costuma ser relativamente alto (centenas de ohms), \(\Delta I\) é pequeno, tornando o sistema naturalmente mais imune.
Quando 4–20 mA é a melhor escolha
O padrão 4–20 mA é preferido quando:
- há longas distâncias (dezenas ou centenas de metros);
- o ambiente é eletricamente agressivo;
- é necessário diagnóstico simples de falhas;
- sensores precisam ser alimentados pelo próprio sinal;
- confiabilidade é mais importante que simplicidade.
Essa robustez explica por que, mesmo com fieldbuses modernos e Ethernet industrial, 4–20 mA continua extremamente atual.
Comparação direta: 0–10 V vs 4–20 mA e impactos no projeto de hardware e firmware
Depois de entender cada padrão isoladamente, a decisão de engenharia passa a ser comparativa e contextual. Não existe “melhor padrão absoluto”; existe o mais adequado ao cenário físico, elétrico e ao nível de confiabilidade exigido. Aqui vale olhar não só o sensor, mas o sistema completo: cabeamento, entradas analógicas, ADC, referência, firmware e manutenção.
Comparação elétrica fundamental
No 0–10 V, o sistema depende fortemente de uma referência comum de terra entre sensor e receptor. Qualquer diferença de potencial entre GNDs aparece diretamente como erro de medição. Em ambientes industriais, isso é frequente devido a:
- correntes de retorno pelo terra,
- malhas de aterramento,
- equipamentos de potência próximos.
Já no 4–20 mA, o loop é essencialmente diferencial em corrente. A referência de terra perde importância relativa, porque a variável medida é a corrente no circuito em série. Isso reduz drasticamente problemas de ground loop.
Comparação matemática do erro
Erro por resistência de cabo
- 0–10 V:
\[
\varepsilon_V \approx I_{in} \cdot R_c
\]
Onde \(I_{in}\) é a corrente drenada pela entrada. Se a impedância de entrada não for suficientemente alta, o erro cresce com o comprimento do cabo. - 4–20 mA:
\[
\varepsilon_I \approx 0 \quad (\text{desde que haja conformidade})
\]
A resistência do cabo só “consome” tensão, não altera a corrente medida.
Erro por ruído
- 0–10 V:
\[
V_{med} = V_{sinal} + V_{ruído}
\] - 4–20 mA:
\[
\Delta I = \frac{V_{ruído}}{R_{loop}}
\]
Com \(R_{loop}\) elevado, a variação de corrente é pequena.
Impacto no projeto de hardware embarcado
Entradas analógicas (ADC)
- 0–10 V: geralmente exige divisor resistivo ou amplificador para adaptar ao range típico do ADC (0–3,3 V ou 0–5 V). Isso adiciona erro de ganho e offset.
- 4–20 mA: basta um resistor de precisão (ex.: 250 Ω, 0,1%) e, opcionalmente, um filtro RC simples. A conversão corrente→tensão é extremamente previsível.
Proteção elétrica
- 0–10 V: mais sensível a surtos e ESD, pois a entrada “vê” diretamente a tensão do campo.
- 4–20 mA: o loop naturalmente limita corrente; ainda assim, proteção contra sobretensão é aplicada, mas o sistema tende a ser mais tolerante.
Impacto no firmware
No firmware, ambos acabam convergindo para a mesma lógica: ler um ADC e aplicar um escalonamento linear. A diferença está na confiabilidade do dado bruto.
Exemplo conceitual comum:
\[
y = y_{\min} + \frac{(x – x_{\min})}{(x_{\max} – x_{\min})}(y_{\max} – y_{\min})
\]
Onde:
- em 0–10 V, (x) é a tensão medida,
- em 4–20 mA, (x) é a corrente (ou a tensão no burden resistor).
No entanto, no 4–20 mA, o firmware ganha uma vantagem adicional:
- leituras abaixo de 3,8 mA podem ser tratadas como falha de campo, e não apenas “valor baixo”.
Isso simplifica diagnóstico, alarmes e estratégias de fail-safe.
Critérios práticos de escolha
Escolha 0–10 V quando:
- o sensor está próximo ao controlador;
- o ambiente é pouco ruidoso;
- custo e simplicidade são prioritários;
- o sistema é mais “máquina local” do que “planta industrial”.
Escolha 4–20 mA quando:
- há longas distâncias de cabo;
- existe forte interferência eletromagnética;
- confiabilidade e diagnóstico são críticos;
- sensores precisam ser alimentados pelo próprio sinal;
- o sistema faz parte de uma planta industrial maior.
Essa análise explica por que, mesmo em projetos modernos com microcontroladores avançados e Ethernet industrial, o front-end analógico 4–20 mA continua sendo padrão de ouro no chão de fábrica.
Integração prática com microcontroladores (STM32, ESP32): cálculo, front-end analógico e firmware
Ao integrar sensores 0–10 V ou 4–20 mA a microcontroladores, o desafio deixa de ser conceitual e passa a ser engenharia de interface: adaptar níveis elétricos ao ADC, preservar precisão, filtrar ruído e transformar a leitura bruta em uma variável física confiável no firmware.
Integração de sensores 0–10 V
A maioria dos microcontroladores (STM32, ESP32, RP2040) possui ADCs com faixa máxima de 3,3 V (alguns STM32 permitem 5 V externamente, mas o ADC interno continua limitado). Portanto, é necessário rebaixar a tensão.
Divisor resistivo
A solução mais simples é um divisor:
\[
V_{ADC} = V_{in} \cdot \frac{R_2}{R_1 + R_2}
\]
Para mapear 0–10 V em 0–3,3 V:
\[
\frac{R_2}{R_1 + R_2} = 0{,}33
\]
Um exemplo prático:
- \(R_1 = 20,k\Omega\)
- \(R_2 = 10,k\Omega\)
Cuidados importantes:
- resistores de 1% ou melhor (idealmente 0,1%);
- impedância equivalente não muito alta, para não prejudicar o sample-and-hold do ADC;
- uso de buffer com amplificador operacional se o cabo for longo ou a fonte tiver alta impedância.
Filtragem
Um filtro RC simples antes do ADC ajuda muito:
\[
f_c = \frac{1}{2\pi RC}
\]
Para sinais lentos (temperatura, nível), cortes entre 5 Hz e 20 Hz são comuns.
Integração de sensores 4–20 mA
Aqui o caminho é mais elegante e previsível.
Resistor de carga (burden)
Escolhendo \(R_b = 250,\Omega\):
\[
V = I \cdot R_b
\]
- 4 mA → 1,0 V
- 20 mA → 5,0 V
Se o ADC for de 3,3 V, duas opções surgem:
- usar \(R_b = 165,\Omega\) → 0,66–3,3 V
- manter 250 Ω e usar divisor/buffer.
A primeira opção costuma ser preferida pela simplicidade.
Potência do resistor
A potência dissipada é:
\[
P = I^2 \cdot R
\]
No pior caso (20 mA, 250 Ω):
\[
P = (0{,}02)^2 \cdot 250 = 0{,}1,W
\]
Logo, usa-se resistor de 0,25 W ou maior, com baixa deriva térmica.
Conversão no firmware
No firmware, a leitura do ADC ((N) bits) gera um valor digital (D):
\[
V_{ADC} = \frac{D}{2^N – 1} \cdot V_{ref}
\]
Para 4–20 mA:
\[
I = \frac{V_{ADC}}{R_b}
\]
E o escalonamento final:
\[
y = y_{\min} + \frac{(I – 4,\text{mA})}{16,\text{mA}}(y_{\max} – y_{\min})
\]
Boas práticas de firmware:
- rejeitar leituras abaixo de 3,8 mA (falha);
- filtrar por média móvel ou filtro IIR simples;
- separar claramente aquisição, conversão e lógica de controle.
Layout e EMC
Independentemente do padrão:
- mantenha trilhas analógicas longe de PWM, clocks e barramentos rápidos;
- use plano de terra contínuo;
- aterramento da blindagem do cabo em um único ponto;
- considere isolamento galvânico em ambientes severos.
Esses cuidados fazem mais diferença do que aumentar bits de ADC.
Seção 6 — Conclusão técnica: por que 0–10 V e 4–20 mA continuam dominantes na indústria
Mesmo com a evolução de barramentos digitais industriais, Ethernet determinística e sensores inteligentes, os padrões 0–10 V e 4–20 mA permanecem amplamente utilizados porque resolvem, de forma simples e comprovada, um problema central da automação: transportar informação analógica com previsibilidade em ambientes hostis. Eles não dependem de pilhas de protocolo, não exigem sincronismo complexo e falham de maneira compreensível para técnicos e engenheiros de campo.
O 0–10 V sobrevive pela simplicidade. Ele é direto, fácil de depurar com um multímetro comum e suficiente para aplicações locais, máquinas compactas e painéis onde o controle de aterramento e ruído é viável. Em termos de engenharia, é um padrão que funciona bem quando o sistema é tratado como um todo — sensor, cabo, referência e ADC — e quando as limitações são conscientemente aceitas.
Já o 4–20 mA permanece como referência em confiabilidade porque sua robustez é estrutural, não circunstancial. A imunidade a ruído, a tolerância a longas distâncias, a independência de referência de terra e o conceito de zero vivo fazem dele um padrão naturalmente alinhado com requisitos de segurança, manutenção e diagnóstico. Em projetos industriais reais, isso se traduz em menos paradas, menos ambiguidades e decisões mais claras no firmware e na operação.
Do ponto de vista de sistemas embarcados, esses padrões também ensinam uma lição importante: engenharia de sinal vem antes de sofisticação de processamento. Um ADC de alta resolução ou um algoritmo avançado não compensam um front-end mal escolhido. É por isso que, mesmo em arquiteturas modernas com STM32, ESP32 ou SoCs industriais, o caminho analógico clássico continua sendo a fundação.
Em resumo:
- 0–10 V é uma solução eficiente quando simplicidade e proximidade física são garantidas.
- 4–20 mA é a escolha natural quando confiabilidade, diagnóstico e ambiente industrial severo entram em jogo.
- a escolha correta reduz complexidade no hardware, no firmware e na manutenção ao longo de toda a vida útil do sistema.