O Problema do Debounce em Chaves Mecânicas
Em praticamente todo sistema embarcado existe algum tipo de entrada digital proveniente de uma ação humana: um botão, uma chave seletora, um micro-switch, um contato de relé ou até mesmo sensores de fim de curso. À primeira vista, parece trivial: o usuário pressiona o botão, o nível lógico muda de 0 para 1 (ou vice-versa), e o firmware reage. No entanto, do ponto de vista físico e elétrico, o comportamento real é muito mais complexo. É nesse contexto que surge o fenômeno conhecido como debounce.
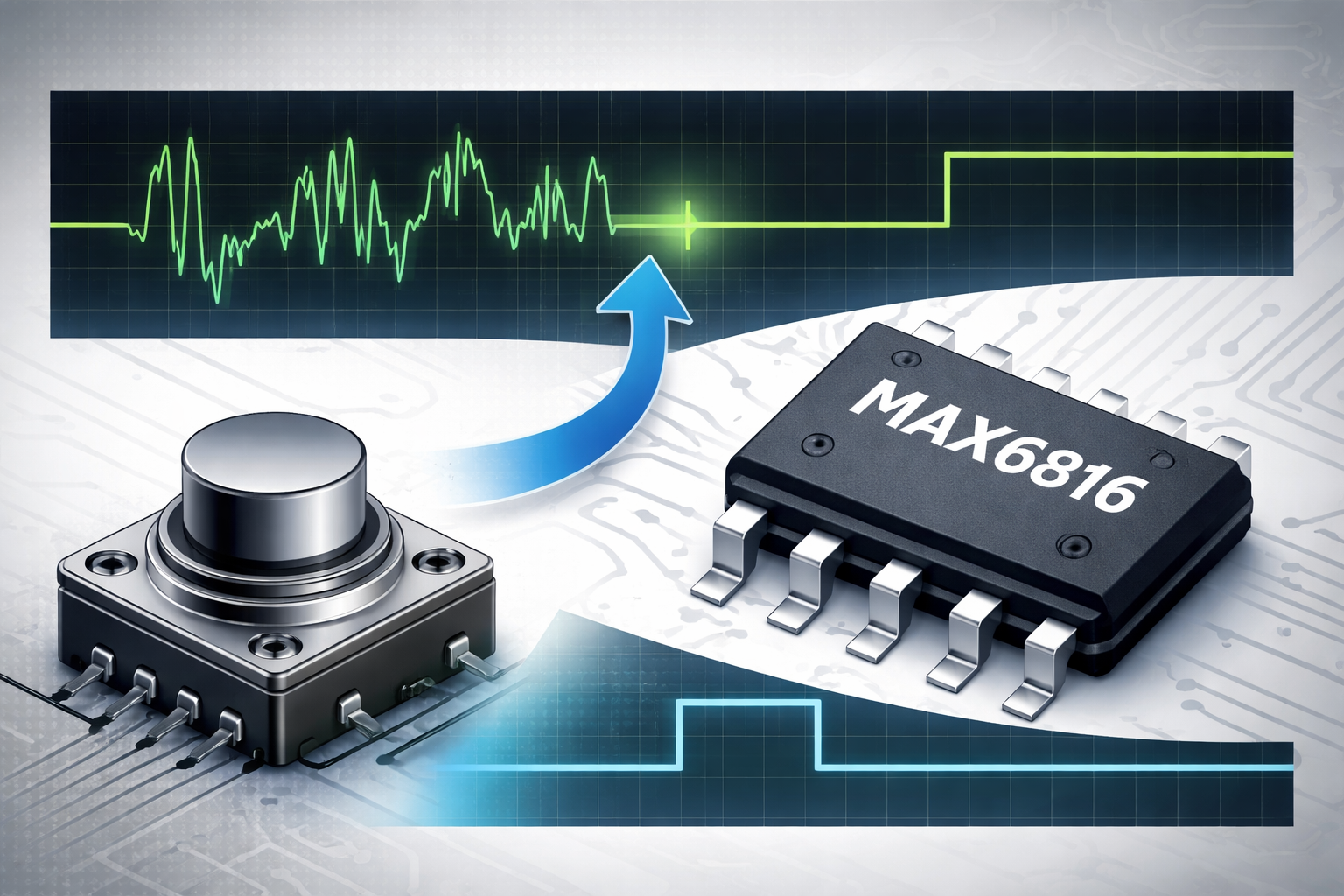
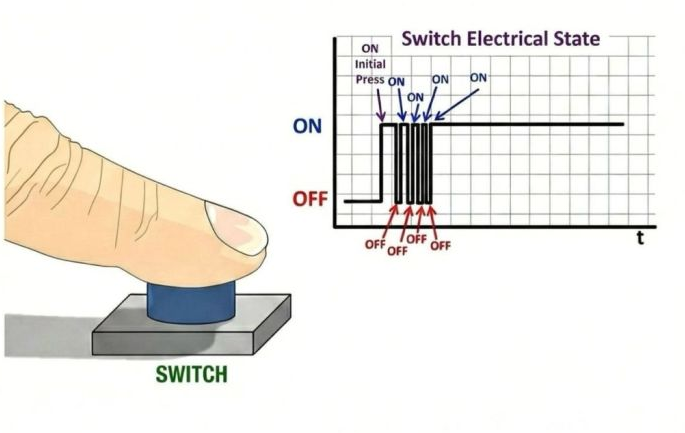
Quando dois contatos metálicos se encostam mecanicamente, eles não estabelecem uma conexão limpa e instantânea. O que ocorre, na prática, é uma sequência rápida de microcolisões antes que o contato se estabilize. Esse comportamento é resultado da elasticidade do material, da vibração mecânica e da geometria dos contatos. Em termos elétricos, isso significa que, ao pressionar um botão, o sinal digital pode oscilar diversas vezes entre nível alto e baixo em poucos milissegundos. Em vez de uma única transição lógica, o microcontrolador pode “enxergar” múltiplas bordas.
As consequências de não tratar o debounce são relevantes e, em muitos casos, críticas. Um simples botão pode ser interpretado como múltiplos pressionamentos, gerando erros de contagem, falhas de navegação em menus, disparos repetidos de comandos ou até mesmo comportamentos perigosos em sistemas industriais. Em aplicações de potência, por exemplo, uma entrada mal tratada pode ligar e desligar um estágio várias vezes em milissegundos, gerando estresse elétrico e térmico. Em sistemas de controle embarcado com interrupções externas, o problema pode se agravar ainda mais, causando sobrecarga de processamento e comportamento imprevisível.
Do ponto de vista de firmware, muitos desenvolvedores iniciantes tentam resolver o problema com atrasos fixos (delays) após a detecção de uma borda. Embora funcione em aplicações simples, essa abordagem bloqueia o processador e não é escalável em sistemas com múltiplas tarefas, especialmente quando se utiliza um sistema operacional de tempo real como o FreeRTOS. Além disso, delays arbitrários não garantem imunidade a ruídos eletromagnéticos ou a interferências externas no barramento.
Portanto, o tratamento adequado do sinal de chaves mecânicas não é apenas uma questão de conveniência, mas de robustez de projeto. Um sistema profissional deve considerar tanto o comportamento mecânico do contato quanto a integridade elétrica do sinal digital entregue ao microcontrolador.