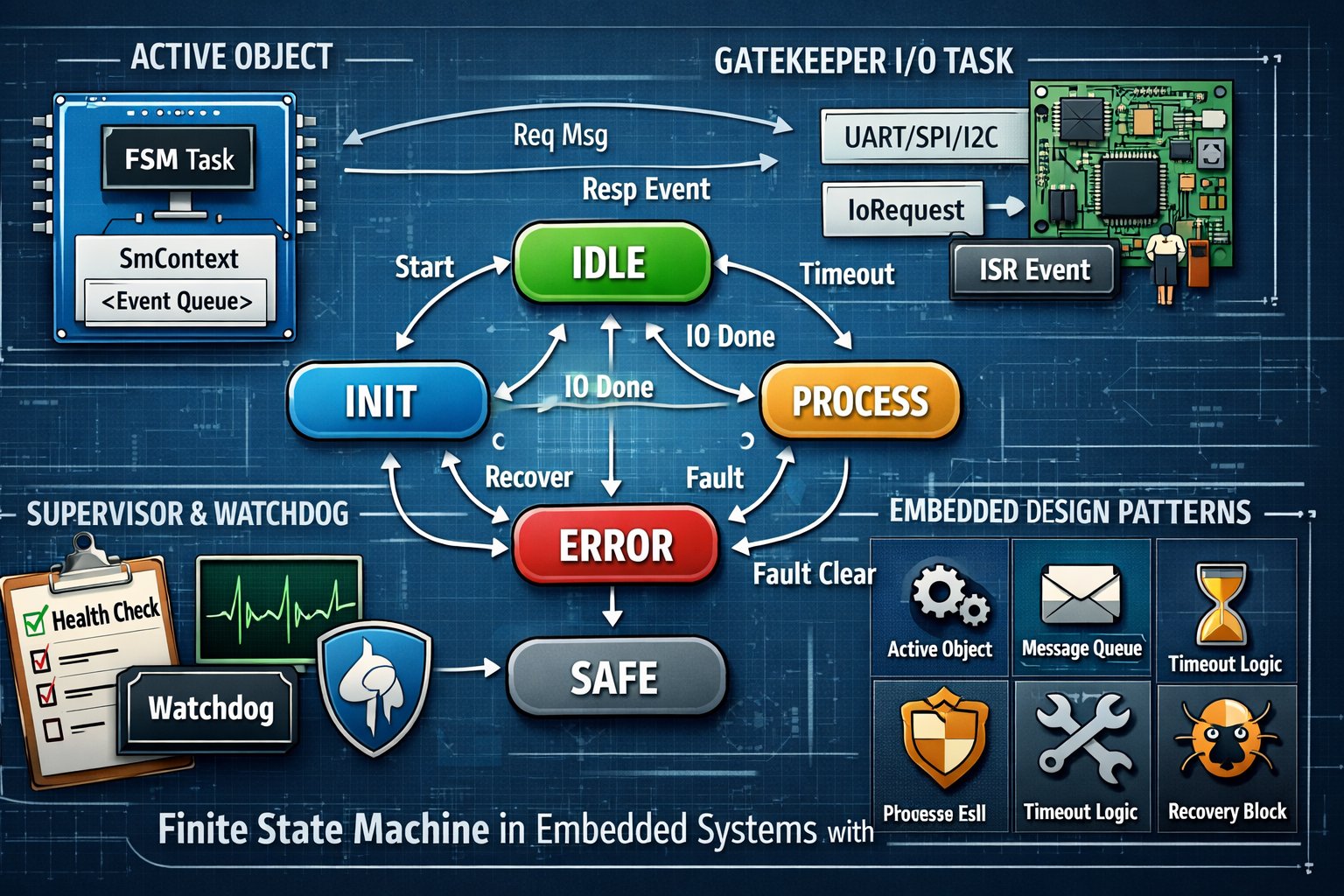
Aprenda como projetar Máquinas de Estados robustas para sistemas embarcados usando FreeRTOS. Este artigo apresenta uma abordagem prática e profissional para construir firmware cíclico e recuperável, utilizando duas threads cooperativas,
Tag: rtos
WCET (Worst Case Execution Time) em FreeRTOS e ZephyrWCET (Worst Case Execution Time) em FreeRTOS e Zephyr
Entenda em profundidade o conceito de WCET (Worst Case Execution Time) e sua aplicação prática em sistemas de tempo real baseados em FreeRTOS e Zephyr. Este artigo apresenta, de forma
Construindo um Servidor Web Embarcado com STM32F429ZI e Azure RTOS NetX DuoConstruindo um Servidor Web Embarcado com STM32F429ZI e Azure RTOS NetX Duo
Aprenda passo a passo como transformar a placa STM32F429ZI em um servidor web embarcado utilizando o Azure RTOS NetX Duo. Este guia didático explica desde os conceitos básicos, como o

Introdução à Nomenclatura do FreeRTOSIntrodução à Nomenclatura do FreeRTOS
Aprenda a nomenclatura do FreeRTOS, incluindo prefixos, sufixos e boas práticas para funções e variáveis. Organize seu código e melhore a legibilidade no desenvolvimento embarcado.
Manipulação de Variáveis Globais do Tipo float e double com Interrupções e Tasks no FreeRTOSManipulação de Variáveis Globais do Tipo float e double com Interrupções e Tasks no FreeRTOS
No desenvolvimento de sistemas embarcados com FreeRTOS, o uso de variáveis globais do tipo float e double exige atenção especial devido à natureza não atômica dessas operações e ao impacto