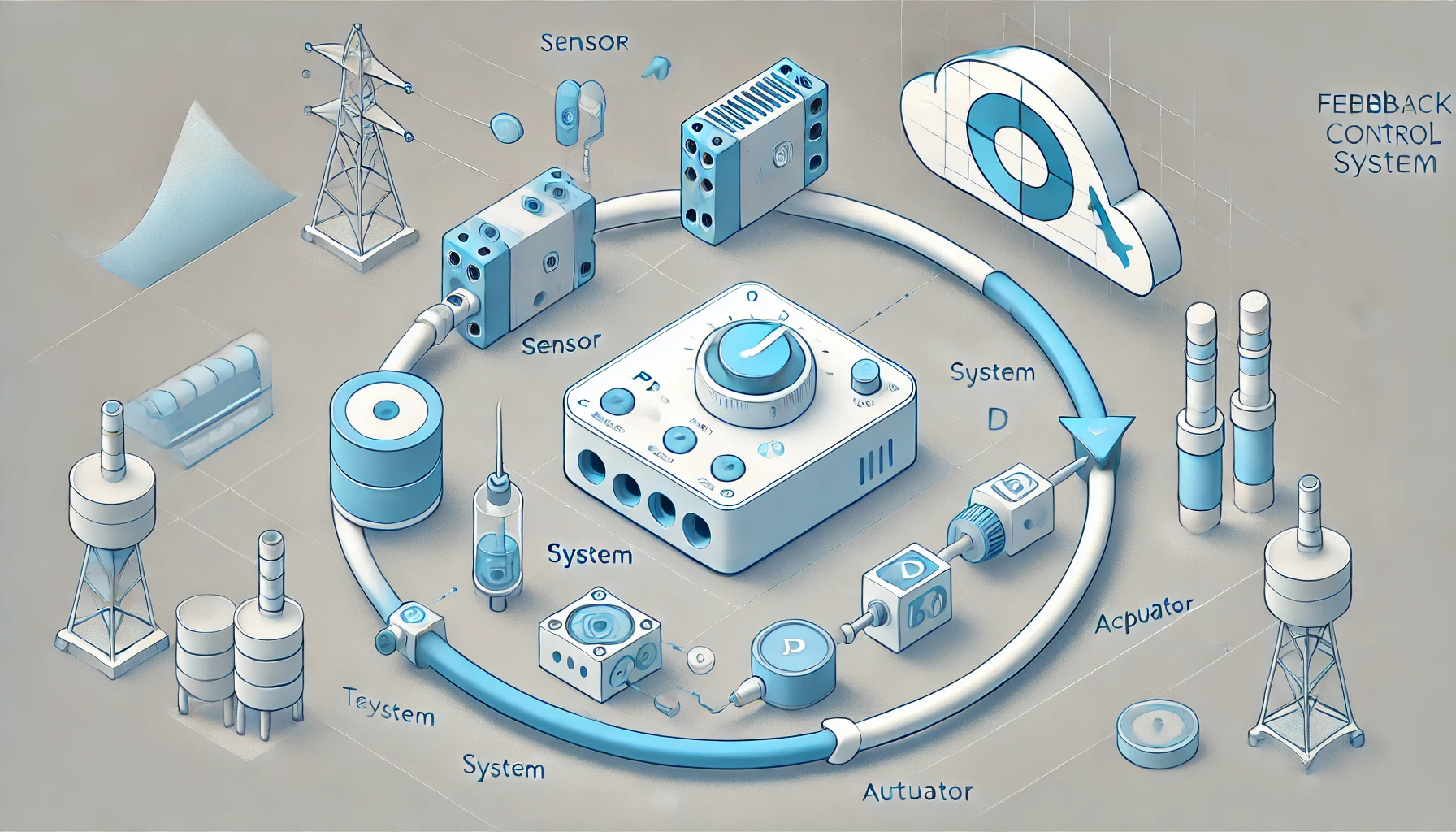
Quando falamos em controle de sistemas (temperatura, velocidade de motor, posição de eixo, nível de tanque, etc.), a primeira grande divisão é entre malha aberta e malha fechada.
- Malha aberta: você envia um comando para o sistema (planta) e não verifica se o resultado foi realmente o desejado.
- Malha fechada (feedback): você mede a saída real, compara com o valor desejado (referência) e ajusta o comando com base nesse erro.
Do ponto de vista matemático, em malha fechada definimos três sinais fundamentais:
- \( r(t) \) – referência ou setpoint (valor desejado: temperatura alvo, velocidade alvo, etc.);
- \( y(t) \) – saída medida do sistema (sensor);
- \( e(t) \) – erro, diferença entre o que queremos e o que estamos obtendo.
A relação básica é:
\[
e(t) = r(t) – y(t)
\]
O controlador (que pode estar implementado em C em um microcontrolador) recebe ( e(t) ) e gera o sinal de controle ( u(t) ) a ser aplicado na planta (por exemplo, PWM do motor, duty-cycle de uma fonte chaveada, corrente em uma resistência de aquecimento, etc.). Em forma de blocos:
\[
r(t) ; \xrightarrow{;\text{cálculo do erro};} e(t) \xrightarrow{;\text{controlador};} u(t) \xrightarrow{;\text{planta};} y(t)
\]
ou de forma resumida:
\[
u(t) = f\big(e(t)\big)
\]
O que transforma o simples “ligar/desligar” num sistema de controle mais sofisticado é justamente a escolha da função ( f(\cdot) ). O controlador PID (Proporcional–Integral–Derivativo) é uma forma específica e muito poderosa de definir essa função.
O que é o PID em termos intuitivos?
O PID é um controlador que combina três ações sobre o erro:
- Proporcional (P) – reage ao tamanho atual do erro.
- Se o erro é grande, o controlador reage com uma ação de controle grande.
- É como alguém que empurra mais forte o carrinho quanto maior for a diferença até o alvo.
- Integral (I) – observa o erro acumulado ao longo do tempo.
- Se o sistema fica “quase” no valor desejado, mas sempre com um pequeno erro, o termo integral vai somando esse erro e “empurrando” a saída até eliminar o erro em regime permanente.
- Derivativo (D) – reage à velocidade de variação do erro.
- Se o erro está mudando rapidamente, o termo D tenta “frear” essa mudança, ajudando a reduzir os overshoots (quando a saída passa muito do valor desejado).
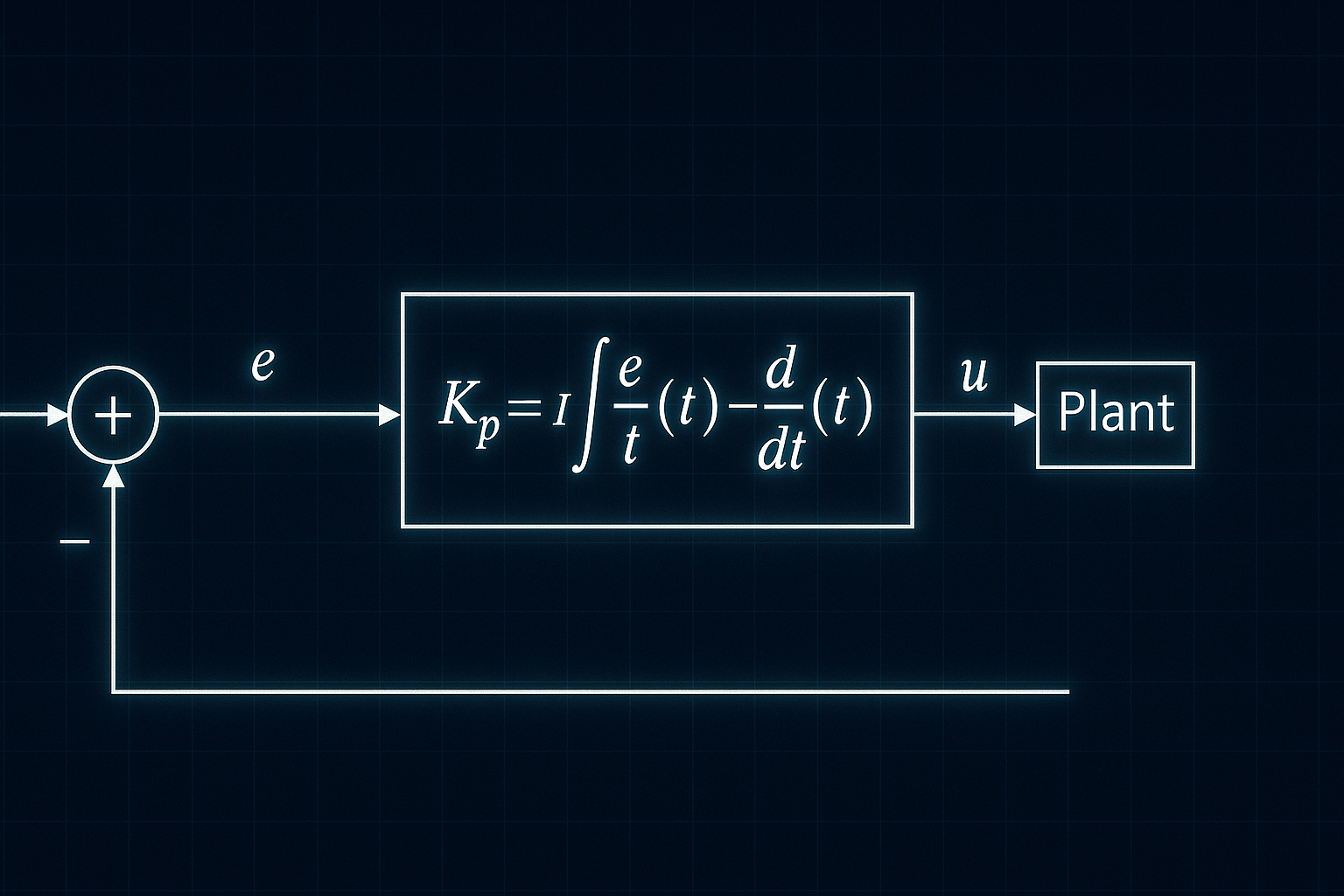
Na forma contínua, a equação geral do PID (no domínio do tempo) é:
\[
u(t) = K_p \cdot e(t) ;+; K_i \int_0^t e(\tau), d\tau ;+; K_d \cdot \frac{de(t)}{dt}
\]
onde:
- \( K_p \) é o ganho proporcional;
- \( K_i \) é o ganho integral;
- \( K_d \) é o ganho derivativo.
Em palavras: o sinal de controle é soma ponderada de três componentes: um proporcional ao erro, um proporcional ao erro acumulado e um proporcional à taxa de variação do erro.
Por que o PID é tão usado?
O PID é extremamente popular em engenharia de controle (e em sistemas embarcados) por vários motivos:
- É simples de entender conceitualmente;
- É relativamente fácil de implementar em C em um microcontrolador;
- Funciona muito bem para uma grande variedade de plantas de primeira e segunda ordem, mesmo quando não temos um modelo matemático super preciso do sistema;
- Permite ajustar compromisso entre tempo de resposta, overshoot, estabilidade e erro em regime apenas mexendo em três parâmetros: \( K_p, K_i, K_d \).
Além disso, em muitos sistemas industriais e acadêmicos, o PID é a “primeira escolha”: se bem ajustado, resolve 80–90% dos casos típicos de controle de processo, motores, temperatura, nível, etc.
Controle em malha fechada simples x PID
Para entender a importância do PID, vale comparar com uma estratégia de controle bem mais simples: o controle “tudo ou nada” (on–off). Imagine um sistema de aquecimento com histerese:
// Exemplo C simples (controle on-off com histerese)
float setpoint = 50.0f; // temperatura desejada (°C)
float hysteresis = 1.0f; // banda morta
int heater_on = 0; // 0 = desligado, 1 = ligado
void control_loop(void) {
float temp = read_temperature_sensor(); // mede a saída y(t)
if (temp < (setpoint - hysteresis)) {
heater_on = 1; // liga o aquecedor
} else if (temp > (setpoint + hysteresis)) {
heater_on = 0; // desliga o aquecedor
}
set_heater_output(heater_on);
}
Esse tipo de controle é:
- Fácil de implementar;
- Funciona “mais ou menos” bem para alguns sistemas lentos (como aquecimento).
Mas apresenta problemas típicos:
- Oscilações em torno do setpoint (liga/desliga o tempo todo);
- Pouco controle sobre tempo de subida, overshoot e estabilidade;
- Difícil atender especificações mais rigorosas de desempenho.
O PID surge justamente como uma evolução desse conceito, trazendo uma ação contínua (não só 0 ou 1), permitindo gerar um comando suave entre, por exemplo, 0% e 100% de PWM, de forma proporcional e inteligente ao erro e à sua dinâmica.
Visão geral do que virá nas próximas seções
Ao longo do artigo vamos:
- Modelar de forma simples uma planta (sistema controlado) para entender a resposta em malha fechada;
- Derivar a equação do PID no tempo contínuo e no tempo discreto (para implementação em firmware);
- Implementar um PID em C, passo a passo, primeiro em ponto flutuante, depois discutindo versões otimizadas (inteiros / fixed-point e anti-windup);
- Comparar PID com outros tipos de controladores de malha fechada: P, PI, PD, on–off e estratégias mais avançadas;
- Apresentar estratégias básicas de sintonia de ganhos ( K_p, K_i, K_d ) para iniciantes.
Modelagem Simples da Planta e Comportamento de Malha Fechada
Antes de mergulharmos no PID em si, é fundamental compreender a dinâmica da planta — isto é, o comportamento natural do sistema que desejamos controlar. Mesmo uma modelagem simples ajuda enormemente a entender por que certas configurações do PID funcionam bem e outras levam à instabilidade, oscilação ou lentidão excessiva.
1. O que é uma Planta em Controle?
Na engenharia de controle, planta é o nome dado ao sistema físico cujas variáveis queremos controlar. Pode ser:
- A temperatura de um forno,
- A velocidade de um motor DC,
- A corrente em um conversor buck,
- O ângulo de um servomecanismo,
- A posição de um robô com STM32.
A planta sempre possui dinâmica, ou seja, a saída não muda instantaneamente quando aplicamos um comando.
2. Exemplo Didático: Planta de Primeira Ordem
Para iniciantes, o modelo mais simples e útil é a planta de primeira ordem. Ela representa sistemas onde a saída responde com atraso suave e gradual ao sinal de controle.
O modelo clássico é:
\[
\tau \frac{dy(t)}{dt} + y(t) = K \cdot u(t)
\]
onde:
- \( y(t) \) — saída (velocidade, temperatura…)
- \( u(t) \) — entrada (PWM, corrente…)
- \( K \) — ganho da planta
- \( \tau \) — constante de tempo (define a “lentidão” do sistema)
Esse modelo descreve:
- Subidas exponenciais,
- Respostas suaves sem overshoot,
- Plantas estáveis que não oscilam sozinhas.
3. Solução do Modelo — Resposta ao Degrau
Se aplicarmos um degrau na entrada \( u(t) = U_0 \), a solução da equação diferencial é:
\[
y(t) = K U_0 \left(1 – e^{-t/\tau}\right)
\]
Explicação:
- Quando o tempo aumenta, o termo ( e^{-t/\tau} ) vai a zero.
- A saída tende ao valor de regime:
\[
y_{\text{reg}} = K \cdot U_0
\]
- Após um tempo igual a ( \tau ), a planta atinge aproximadamente 63% do valor final.
- Após 4τ, o sistema está praticamente estabilizado.
4. Planta Discreta (para implementação em C)
Em firmware, não lidamos com equações diferenciais contínuas, mas com valores amostrados a cada período de controle ( T_s ).
A versão discreta da planta de primeira ordem é:
\[
y[k] = a \cdot y[k-1] + b \cdot u[k]
\]
onde:
- \( a = e^{-T_s/\tau} \)
- \( b = K \left(1 – e^{-T_s/\tau}\right) \)
Esse modelo é extremamente útil para simular e testar controladores PID em C sem hardware real.
5. Exemplo em C — Simulação de uma Planta de Primeira Ordem
O exemplo abaixo calcula a resposta da planta ao longo do tempo e imprime a saída no terminal.
#include <stdio.h>
#include <math.h>
// Parâmetros da planta
#define K_PLANTA 1.0f
#define TAU 0.5f
#define TS 0.01f // tempo de amostragem (10 ms)
#define STEPS 200 // número de iterações
int main() {
float a = expf(-TS / TAU);
float b = K_PLANTA * (1.0f - a);
float y = 0.0f; // saída da planta
float u = 1.0f; // degrau de entrada
for (int k = 0; k < STEPS; k++) {
y = a * y + b * u;
printf("%d\t%.4f\n", k, y);
}
return 0;
}
Ao rodar o código, a saída exibirá uma curva crescente típica de um sistema de primeira ordem.
6. O que Você Deve Perceber Dessa Seção
- Uma planta de primeira ordem é lenta e suave — ótima para aprender controle.
- O tempo de resposta depende da constante ( \tau ).
- Plantas reais podem ser mais complexas (2ª ordem, com atrito, com atraso de transporte etc.).
- Mesmo assim, começamos com modelos simples para entender o comportamento fundamental.
Derivação Completa do Controlador PID (Contínuo e Discreto)
Agora que já estabelecemos o que é a planta e como o erro ( e(t) ) se relaciona com o sinal de controle, vamos derivar cuidadosamente o PID contínuo e a sua forma discreta, que é a usada em microcontroladores.
Esta seção é fundamental: aqui você aprende de onde vêm as fórmulas, por que elas funcionam e como traduzir tudo isso para C de forma segura e eficiente.
1. Revisão Intuitiva das Três Ações
O controlador PID é definido pela soma de três componentes:
- Proporcional (P)
- Integral (I)
- Derivativo (D)
Cada uma reage ao erro de uma forma distinta:
\[
u(t) = u_P(t) + u_I(t) + u_D(t)
\]
onde:
- \( u_P(t) = K_p \cdot e(t) \)
- \( u_I(t) = K_i \cdot \int_0^t e(\tau), d\tau \)
- \( u_D(t) = K_d \cdot \frac{de(t)}{dt} \)
Essa é a forma contínua, idealizada.
Mas no firmware, nada é contínuo — tudo é amostrado.
2. Forma Contínua do PID
A expressão tradicional é:
\[
u(t) = K_p e(t) + K_i \int_0^t e(\tau), d\tau + K_d \frac{de(t)}{dt}
\]
Essa formulação:
- É matematicamente elegante;
- Ajuda no projeto teórico;
- Não pode ser usada diretamente em C, pois integra e deriva continuamente.
Para converter para o uso real, precisamos discretizar.
3. Discretização do PID (Amostragem)
3.1 Erro discreto
O controlador roda a cada período de amostragem ( T_s ). Então definimos:
\[
e[k] = r[k] – y[k]
\]
onde ( k ) é o índice da iteração.
4. Ação Proporcional (discreta)
Simplesmente:
\[
u_P[k] = K_p \cdot e[k]
\]
Essa parte é direta — basta multiplicar.
5. Ação Integral (discreta)
A integral é a soma acumulada dos erros:
\[
u_I[k] = u_I[k-1] + K_i \cdot T_s \cdot e[k]
\]
onde:
- \( u_I[k] \) é o valor integral acumulado,
- O termo \( K_i \cdot T_s \) costuma ser chamado de ganho integral discreto.
Esse termo é responsável por eliminar o erro de regime permanente.
Mais adiante trataremos do problema do windup, ou “saturação integral”.
6. Ação Derivativa (discreta)
Usamos uma derivada numérica simples:
\[
u_D[k] = K_d \cdot \frac{e[k] – e[k-1]}{T_s}
\]
Se quisermos uma forma mais filtrada (menos ruidosa), podemos implementar um filtro passa-baixa — veremos depois.
7. Fórmula Completa do PID Discreto
Somando P, I e D:
\[
u[k] = K_p e[k] ;+; u_I[k] ;+; K_d \frac{e[k] – e[k-1]}{T_s}
\]
Essa é a forma mais direta para firmware.
8. Implementação do PID Discreto — Versão Didática em C
Aqui está o código mais claro possível para iniciantes.
typedef struct {
float Kp;
float Ki;
float Kd;
float Ts; // tempo de amostragem
float integrator; // acumulo integral
float prev_error; // erro da iteração anterior
float prev_output; // saída anterior (opcional)
} PID_Controller;
float PID_Update(PID_Controller *pid, float setpoint, float measurement) {
// 1. Calcula erro
float error = setpoint - measurement;
// 2. Termo proporcional
float P = pid->Kp * error;
// 3. Termo integral
pid->integrator += pid->Ki * pid->Ts * error;
float I = pid->integrator;
// 4. Termo derivativo
float derivative = (error - pid->prev_error) / pid->Ts;
float D = pid->Kd * derivative;
// 5. Soma dos termos
float output = P + I + D;
// 6. Atualiza estado
pid->prev_error = error;
pid->prev_output = output;
return output;
}
Essa é a base do PID clássico.
9. O que você deve entender desta seção
- O PID contínuo não é diretamente programável: precisamos transformá-lo em uma versão discreta.
- A discretização envolve aproximação da integral com soma acumulada e da derivada com diferença entre amostras.
- O resultado é um algoritmo simples, rápido e adequado para microcontroladores de 8, 16 ou 32 bits.
- Esta é a fundação para versões mais robustas: anti-windup, saturação, derivada filtrada, PID em ponto fixo, etc.
Implementação Completa do PID em C
(com Saturação, Anti-Windup, Derivada Filtrada e Estrutura Robusta)
Nesta seção avançamos da versão didática do PID para uma implementação realista, própria para sistemas embarcados. A ideia é construir um controlador seguro, estável e pronto para produção em microcontroladores ARM Cortex-M, RISC-V, AVR ou RP2040.
Vamos abordar:
- Saturação da saída
- Anti-windup (evita integral descontrolada)
- Derivada filtrada (reduz ruído)
- Proteção contra valores inválidos
- Versão final robusta
1. Saturação da Saída (Clamping)
Em sistemas reais, a saída do controle nunca é ilimitada. Exemplos:
- PWM entre 0% e 100%
- Corrente máxima limitada
- Ângulo de servo limitado
- Tensão restrita
Para evitar comandos fisicamente impossíveis, fazemos:
\[
u_{\text{sat}} = \min(\max(u,, u_{\min}),, u_{\max})
\]
Se ignorarmos isso, o controlador pode gerar valores absurdos e tornar o sistema instável.
2. Anti-Windup
O termo integral acumula o erro. Mas quando o controlador satura a saída, continuar acumulando integral faz o erro “explodir”, produzindo oscilações longas e perda de estabilidade.
Exemplo clássico:
- PID pede PWM = 150% → saturação em 100%
- Termo integral continua crescendo
- Quando o erro muda de sinal, o integral demora a “descarregar”
Para evitar isso, uma solução comum é:
\[
\text{Se } u \text{ saturou, então não atualize o termo integral}
\]
ou uma forma mais suave (back-calculation), que veremos depois.
3. Derivada Filtrada (Filtro Passa-Baixa)
A derivada é extremamente sensível ao ruído. Em motores, fontes chaveadas, sensores barulhentos… o termo D pode oscilar violentamente.
O filtro passa-baixa discreto mais comum é:
\[
D_f[k] = \alpha D_f[k-1] + (1 – \alpha) D_{\text{bruto}}[k]
\]
onde:
\[
\alpha = \frac{\tau_d}{\tau_d + T_s}
\]
e \( \tau_d \) é o tempo do filtro.
Escolhas típicas:
- \( \alpha = 0.90 \) (filtro leve)
- \( \alpha = 0.98 \) (filtro forte)
4. Estrutura Robusta em C
Agora juntamos tudo: saturação, anti-windup, derivada filtrada.
typedef struct {
float Kp;
float Ki;
float Kd;
float Ts; // tempo de amostragem
float out_min; // saturação mínima
float out_max; // saturação máxima
// Estado interno
float integrator;
float prev_error;
float deriv_filtered;
float alpha; // coeficiente do filtro derivativo
} PID_Controller;
// Atualiza o PID com anti-windup e D filtrado
float PID_Update(PID_Controller *pid, float setpoint, float measurement) {
// 1. Erro
float error = setpoint - measurement;
// 2. Proporcional
float P = pid->Kp * error;
// 3. Integral (somente se NÃO saturado)
pid->integrator += pid->Ki * pid->Ts * error;
// 4. Derivada bruta
float derivative_raw = (error - pid->prev_error) / pid->Ts;
// 5. Derivada filtrada
pid->deriv_filtered =
pid->alpha * pid->deriv_filtered +
(1.0f - pid->alpha) * derivative_raw;
float D = pid->Kd * pid->deriv_filtered;
// 6. Soma
float output = P + pid->integrator + D;
// 7. Saturação
float output_sat = output;
if (output_sat > pid->out_max) output_sat = pid->out_max;
else if (output_sat < pid->out_min) output_sat = pid->out_min;
// 8. Anti-windup (se saturou, desfaz parte da integral)
if (output != output_sat) {
// back-calculation clássico
float aw_gain = 0.5f; // ajustável
pid->integrator += aw_gain * (output_sat - output);
}
// 9. Guarda estado
pid->prev_error = error;
return output_sat;
}
5. Por que esta versão é “industrial”?
Porque inclui todos os elementos necessários para evitar problemas clássicos:
Problemas que esta versão previne:
- Saturação violenta do controle
- Explosão do termo integral (windup)
- Ruído amplificado pelo termo derivativo
- Oscilações excessivas em sistemas rápidos
- Estouro numérico em microcontroladores de ponto flutuante simples
Onde essa versão é usada?
- Controle de velocidade (motores DC ou BLDC)
- Controle de temperatura (fornos, resistências, Peltier)
- Controle de posição (sistemas robóticos)
- Conversores chaveados tipo Buck/Boost
- Drones, robôs móveis e estabilizadores
6. Valores típicos de α (filtro derivativo)
| Tipo de Sistema | α recomendado | Observações |
|---|---|---|
| Sistemas ruidosos (motores DC, sensores Hall) | 0.95–0.99 | Forte filtragem |
| Sistemas limpos (encoders ópticos) | 0.85–0.95 | Mais responsivo |
| Sistemas de temperatura | 0.5–0.7 | D quase desnecessário |
7. Observação para iniciantes
- Nem todo PID precisa de termo D.
- Muitas plantas funcionam melhor com PI, especialmente sistemas térmicos.
- O termo D deve ser usado com cuidado, e quase sempre com filtro.
Comparação entre PID e Outros Controladores de Malha Fechada
Agora que temos um PID robusto, faz sentido compará-lo com outras estratégias de controle em malha fechada. Isso ajuda a entender quando realmente vale a pena usar PID, quando um PI basta, ou quando um simples on-off resolve o problema.
Vamos comparar:
- ON–OFF (tudo ou nada)
- P (somente proporcional)
- PI (proporcional + integral)
- PD (proporcional + derivativo)
- PID completo
Sempre com foco em intuição, fórmulas básicas e exemplos em C.
1. Controle ON–OFF (Tudo ou Nada)
É o mais simples de todos. A função de controle é basicamente:
\[
u(t) =
\begin{cases}
u_{\max}, & \text{se } e(t) > \Delta \
u_{\min}, & \text{se } e(t) < -\Delta \
\text{não muda}, & \text{caso contrário}
\end{cases}
\]
onde \( \Delta \) é a histerese.
Características:
- Fácil de implementar;
- Gera oscilações em torno do setpoint;
- Não controla bem tempo de subida, overshoot, etc.;
- Bom para sistemas lentos e tolerantes a erro (geladeiras, aquecedores simples, caixas d’água).
Exemplo em C (relembrando, mas simplificado):
float setpoint = 50.0f;
float hysteresis = 1.0f;
int output_on = 0;
float onoff_update(float measurement) {
float error = setpoint - measurement;
if (error > hysteresis) {
output_on = 1;
} else if (error < -hysteresis) {
output_on = 0;
}
return (float)output_on; // 0 ou 1
}
2. Controle Proporcional (P)
Função de controle:
\[
u(t) = K_p \cdot e(t)
\]
No discreto:
\[
u[k] = K_p \cdot e[k]
\]
Características:
- Simples;
- Resposta mais suave que on–off;
- Diminui o erro, mas em geral deixa um erro de regime permanente (offset) quando a planta não é puramente integradora;
- Grande \( K_p \) → resposta mais rápida, mas com overshoot e risco de oscilações.
Exemplo em C:
float Kp = 2.0f;
float P_update(float setpoint, float measurement) {
float error = setpoint - measurement;
float output = Kp * error;
return output; // lembrando de saturar em outra função
}
3. Controle Proporcional–Integral (PI)
Função de controle:
\[
u(t) = K_p e(t) + K_i \int_0^t e(\tau) d\tau
\]
No discreto:
\[
\begin{aligned}
u_I[k] &= u_I[k-1] + K_i T_s e[k] \
u[k] &= K_p e[k] + u_I[k]
\end{aligned}
\]
Características:
- Elimina o erro de regime permanente;
- Muito usado em controle de velocidade e temperatura;
- Menos sensível a ruído que PID (sem termo D);
- Se o integral for exagerado, causa overshoot grande e oscilações.
Versão simples em C (sem filtros):
typedef struct {
float Kp;
float Ki;
float Ts;
float integrator;
} PI_Controller;
float PI_Update(PI_Controller *pi, float setpoint, float measurement) {
float error = setpoint - measurement;
// Proporcional
float P = pi->Kp * error;
// Integral
pi->integrator += pi->Ki * pi->Ts * error;
float I = pi->integrator;
float output = P + I;
return output;
}
Na prática, você pode pegar o PID completo da seção anterior e apenas colocar Kd = 0.
4. Controle Proporcional–Derivativo (PD)
Função de controle:
\[
u(t) = K_p e(t) + K_d \frac{de(t)}{dt}
\]
No discreto:
\[
u[k] = K_p e[k] + K_d \frac{e[k] – e[k-1]}{T_s}
\]
Características:
- Bom para sistemas onde não precisamos eliminar erro de regime permanente, mas queremos melhorar a resposta transitória (reduzir overshoot, “frear” o sistema);
- Pode ser usado como “melhorador de dinâmica” em oposição ao PI, que foca em eliminar erro estacionário;
- Muito sensível a ruído se não usar filtro na derivada.
Exemplo em C (usar só para fins didáticos):
typedef struct {
float Kp;
float Kd;
float Ts;
float prev_error;
} PD_Controller;
float PD_Update(PD_Controller *pd, float setpoint, float measurement) {
float error = setpoint - measurement;
// Proporcional
float P = pd->Kp * error;
// Derivativo
float derivative = (error - pd->prev_error) / pd->Ts;
float D = pd->Kd * derivative;
pd->prev_error = error;
float output = P + D;
return output;
}
5. Controle PID Completo
Função de controle:
\[
u(t) = K_p e(t) + K_i \int_0^t e(\tau), d\tau + K_d \frac{de(t)}{dt}
\]
Em discreto:
\[
u[k] = K_p e[k] + u_I[k] + K_d \frac{e[k] – e[k-1]}{T_s}
\]
Características:
- Combina o melhor dos dois mundos:
- P → resposta rápida;
- I → zera erro estacionário;
- D → melhora dinamicamente a resposta (menos overshoot, mais amortecimento);
- Exige mais cuidado de sintonia do que P ou PI;
- Em muitos sistemas práticos, um bom PI já resolve, e o D é usado apenas em casos específicos (posição, robótica, sistemas muito rápidos).
6. Tabela Comparativa Resumida
| Controlador | Erro em regime | Overshoot | Sensibilidade a ruído | Complexidade | Uso típico |
|---|---|---|---|---|---|
| ON–OFF | Médio/Alto | Oscila | Baixa | Muito baixa | Temperatura simples, nível |
| P | Médio | Pode ser alto | Baixa/Media | Baixa | Sistemas simples, controle grosseiro |
| PI | Baixo (≈0) | Médio | Baixa | Média | Velocidade, temperatura, processos industriais |
| PD | Médio | Baixo | Alta (sem filtro) | Média | Posição, robótica, sistemas rápidos |
| PID | Baixo (≈0) | Ajustável | Alta (D precisa de filtro) | Média/Alta | Casos gerais de controle de precisão |
7. Quando Escolher Cada Um?
- ON–OFF: se o sistema é lento, tolerante a erro e não exige precisão (termostatos simples).
- P: quando queremos apenas “melhorar um pouco” a estabilidade e reduzir erro sem necessidade de zerá-lo.
- PI: primeira escolha para controle de processos (velocidade, temperatura, nível) onde o erro estacionário deve ser quase zero.
- PD: útil em sistemas mecânicos onde já existe alguma integral natural (por exemplo, dinâmica de posição/velocidade) e queremos só “amortecer”.
- PID: quando o sistema exige boa dinâmica e erro próximo de zero, e há atenção especial à sintonia e filtragem do derivativo.
Sintonia de PID
(métodos básicos, fórmulas práticas e passo a passo de ajuste com exemplos em C)
A sintonia é o processo de escolher valores adequados para Kp, Ki e Kd. É aqui que o controlador realmente “ganha vida”. Não existe um único método universal, mas há abordagens clássicas, práticas e bem aceitas na engenharia de controle — todas aplicáveis a microcontroladores.
Nesta seção, você aprenderá:
- Como cada ganho influencia o comportamento
- Métodos clássicos de sintonia (Ziegler–Nichols, método da resposta ao degrau)
- Métodos práticos para quem está programando microcontroladores
- Exemplos reais em C para ajustes automáticos simples
1. Efeito de Cada Ganho (Intuição Essencial)
Se você entender isso, já terá 50% da sintonia dominada.
1.1 Ganho Proporcional – Kp
- Aumenta a velocidade de resposta
- Reduz erro transitório
- Aumenta overshoot
- Pode causar oscilações
Regra prática:
Se o sistema está lento → aumente Kp
Se está oscilando → reduza Kp
1.2 Ganho Integral – Ki
- Elimina erro estacionário
- Pode causar overshoot
- Pode causar oscilações de baixa frequência
- É a principal causa de windup
Regra prática:
Se o sistema estabiliza mas não atinge o setpoint → aumente Ki
Se começa a oscilar lentamente → reduza Ki
1.3 Ganho Derivativo – Kd
- Melhora o amortecimento
- Reduz overshoot
- Reduz oscilações
- Muito sensível a ruído (use filtro!)
Regra prática:
Se o sistema passa muito do setpoint (overshoot alto) → aumente Kd
Se o sistema responde lentamente, mas sem instabilidade → diminua Kd
2. Métodos de Sintonia
2.1 Ziegler–Nichols Clássico (Método de Oscilação)
Este é o método mais famoso do mundo industrial.
Passos:
- Coloque Ki = 0 e Kd = 0
- Aumente Kp até o sistema começar a oscilar de forma sustentada
- Registre:
- Ku (K ultimate) = ganho que causa oscilação sustentada
- Tu (período da oscilação)
A partir de Ku e Tu aplicam-se fórmulas:
| Controlador | Kp | Ki | Kd |
|---|---|---|---|
| P | 0.50 Ku | – | – |
| PI | 0.45 Ku | 1.2 Kp / Tu | – |
| PID | 0.60 Ku | 2 Kp / Tu | Kp Tu / 8 |
O método é rápido, simples e funciona bem para plantas não muito ruidosas.
2.2 Método da Resposta ao Degrau
Consiste em aplicar um degrau na entrada e medir:
- Tempo de subida
- Tempo morto
- Inclinação inicial
A curva típica é aproximada por um modelo FOPDT:
\[
G(s) = \frac{K}{\tau(1 + sT_d)} e^{-Ls}
\]
Depois aplica-se uma tabela parecida com Ziegler–Nichols.
2.3 Método Manual (prático e recomendado em microcontroladores)
Este método é amplamente usado na prática porque é intuitivo e seguro.
Passo 1 – Ajuste Kp
- Comece com Kp baixo
- Aumente até que o sistema fique rápido, mas sem oscilar muito
Passo 2 – Ajuste Ki
- Aumente Ki até eliminar o erro permanente
- Se começar a oscilar lentamente → reduza Ki
Passo 3 – Ajuste Kd
- Adicione Kd para reduzir overshoot
- Ajuste até encontrar o ponto onde a resposta fica limpa e estável
Este método funciona muito bem mesmo sem conhecimento profundo da planta.
3. Exemplo Prático com Código em C
(Ajuste manual supervisionado por microcontrolador)
Imagine que temos um controlador PID rodando a cada 10 ms controlando velocidade de motor.
Vamos adicionar um ajuste semiautomático, permitindo alterar ganhos via UART ou Bluetooth.
void tune_pid_step(PID_Controller *pid) {
float error = pid->prev_error;
// Heurística simples de ajuste
if (fabs(error) > 10.0f) {
pid->Kp += 0.01f; // aumentar agressividade
} else if (fabs(error) < 2.0f) {
pid->Ki += 0.001f; // remover erro residual
}
// Pequeno amortecimento se houver oscilação
static float sign_prev = 0;
float sign_now = (error > 0) ? 1 : -1;
if (sign_now != sign_prev) {
pid->Kd += 0.005f; // oscila → aumenta termo D
}
sign_prev = sign_now;
}
É claro que ajustes automáticos reais são mais sofisticados, mas esse exemplo mostra a ideia.
4. Sintonia Específica para Tipos de Sistemas
4.1 Controle de Temperatura
- Use PI
- Kp pequeno
- Ki pequeno
- D quase sempre = 0
- Planta muito lenta → filtragem alta
Valores típicos:
Kp = 1.0
Ki = 0.1
Kd = 0.0
4.2 Controle de Velocidade de Motor DC
- Use PI ou PID leve
- Sistemas moderadamente rápidos
- D pode ajudar
- Antiwindup obrigatório
Valores típicos:
Kp = 0.3
Ki = 0.05
Kd = 0.01
4.3 Controle de Posição (robótica)
- PID completo
- D obrigatório
- Ki muito baixo
Valores típicos:
Kp = 1.5
Ki = 0.02
Kd = 0.4
5. Armadilhas Comuns
- Ki muito alto → instabilidade
- Kd sem filtro → ruído amplificado
- Kp alto demais → oscilação
- Período de amostragem mal escolhido
(ideal: 10–20 vezes mais rápido que a dinâmica da planta)
Exemplos Completos de Aplicação do PID em C
(com Planta Simulada, Controle Realista e Casos Usuais em Engenharia)
Nesta seção vamos consolidar tudo o que estudamos, apresentando exemplos completos, totalmente funcionais e didáticos, em C. Cada exemplo usa:
- Planta discreta (simulada ou medida)
- PID robusto com anti-windup e filtro derivativo
- Código estruturado
- Explicação detalhada para iniciantes
Isso permitirá que você implemente em microcontroladores reais (ARM, RISC-V, RP2040, AVR, ESP32 etc.) ou teste diretamente no PC.
1. Exemplo: Controle de Velocidade de Motor DC
(simulação completa com planta discreta)
1.1 Modelo da planta
Motores DC de baixa potência possuem dinâmica aproximada por um sistema de primeira ordem:
\[
y[k] = a \cdot y[k-1] + b \cdot u[k]
\]
Onde:
- \( u[k] \) = PWM (0 a 1)
- \( y[k] \) = velocidade (RPM normalizada)
1.2 Código completo
#include <stdio.h>
#include <math.h>
typedef struct {
float Kp, Ki, Kd;
float Ts;
float out_min, out_max;
float integrator;
float prev_error;
float deriv_filtered;
float alpha;
} PID;
float PID_Update(PID *pid, float setpoint, float measurement) {
float error = setpoint - measurement;
// Proporcional
float P = pid->Kp * error;
// Integral
pid->integrator += pid->Ki * pid->Ts * error;
// Derivativa filtrada
float d_raw = (error - pid->prev_error) / pid->Ts;
pid->deriv_filtered = pid->alpha * pid->deriv_filtered +
(1 - pid->alpha) * d_raw;
float D = pid->Kd * pid->deriv_filtered;
// Saída
float output = P + pid->integrator + D;
// Saturação
float out_sat = output;
if (out_sat > pid->out_max) out_sat = pid->out_max;
else if (out_sat < pid->out_min) out_sat = pid->out_min;
// Anti-windup
if (out_sat != output) {
pid->integrator += 0.5f * (out_sat - output);
}
pid->prev_error = error;
return out_sat;
}
int main() {
// Planta de primeira ordem do motor
float K = 1.0f; // ganho
float tau = 0.2f; // constante de tempo
float Ts = 0.01f; // 10 ms
float a = expf(-Ts / tau);
float b = K * (1.0f - a);
PID pid = {
.Kp = 0.40f, .Ki = 1.0f, .Kd = 0.01f,
.Ts = Ts,
.out_min = 0.0f, .out_max = 1.0f,
.integrator = 0,
.prev_error = 0,
.deriv_filtered = 0,
.alpha = 0.95f
};
float y = 0.0f;
float setpoint = 0.8f; // 80% da velocidade máxima
for (int k = 0; k < 500; k++) {
float u = PID_Update(&pid, setpoint, y); // atualiza controlador
y = a * y + b * u; // atualiza planta
printf("%d %.4f %.4f\n", k, u, y);
}
}
1.3 O que observar ao executar:
- A velocidade
ysobe suavemente até0.8 - Pouco overshoot
- Estabilidade garantida
- O sinal
u(PWM) atinge valores moderados conforme a planta responde
Esse é o mesmo mecanismo usado em controle de velocidade de motores em robôs, ventiladores, atuadores lineares etc.
2. Exemplo: Controle de Temperatura (PI)
Plantas térmicas são lentas e geralmente não precisam do termo derivativo.
2.1 Modelo térmico simples
\[
T[k] = a T[k-1] + b u[k]
\]
Com:
a ≈ 0.99para sistemas muito lentosu[k] = potência (0–1)
2.2 Código PI reduzido
typedef struct {
float Kp, Ki;
float Ts;
float integrator;
float out_min, out_max;
} PI;
float PI_Update(PI *pi, float setpoint, float T) {
float error = setpoint - T;
float P = pi->Kp * error;
pi->integrator += pi->Ki * pi->Ts * error;
float out = P + pi->integrator;
if (out > pi->out_max) {
out = pi->out_max;
pi->integrator -= pi->Ki * pi->Ts * error;
}
else if (out < pi->out_min) {
out = pi->out_min;
pi->integrator -= pi->Ki * pi->Ts * error;
}
return out;
}
Este código é praticamente o usado em aquecedores, estufas, controle de hotend de impressoras 3D, reatores químicos pequenos etc.
3. Exemplo: Controle de Posição (PID com D forte)
Plantas de posição normalmente se comportam como integração dupla (velocidade + posição), exigindo:
- Kp alto
- Ki baixo (para evitar drift)
- Kd alto (para amortecer)
3.1 Código de aplicação
float position_controller(PID *pid, float desired_position, float measured_position) {
return PID_Update(pid, desired_position, measured_position);
}
Esse controlador é adequado para:
- Controle de eixos robóticos
- Máquinas CNC pequenas
- Gimbals e estabilizadores
4. Exemplo: Simulador Completo em C
(para teste de diferentes controladores)
O código abaixo permite trocar entre P, PI e PID facilmente para comparar respostas:
typedef enum { CTL_P, CTL_PI, CTL_PID } control_mode_t;
float control_step(control_mode_t mode,
PID *pid, PI *pi,
float setpoint, float y)
{
switch (mode) {
case CTL_P:
return pid->Kp * (setpoint - y);
case CTL_PI:
return PI_Update(pi, setpoint, y);
case CTL_PID:
default:
return PID_Update(pid, setpoint, y);
}
}
Assim é possível comparar dinamicamente:
- Overshoot
- Tempo de subida
- Erro estacionário
- Estabilidade
5. Lições Práticas desta Seção
- Simular plantas ajuda demais na compreensão do PID.
- PID completo é mais útil em sistemas rápidos e mecânicos (motores, robótica).
- PI é excelente para sistemas térmicos e processos lentos.
- Saturação e anti-windup são essenciais em qualquer microcontrolador.
- Derivada filtrada é obrigatória em aplicações reais com ruído.
Conclusão Geral
O controlador PID permanece como o padrão-ouro em engenharia de controle porque equilibra simplicidade, robustez e capacidade de ajuste fino para diversos tipos de plantas. Ele é suficientemente poderoso para controlar motores, temperatura, posição, tensão, corrente e sistemas mecânicos complexos, mas ao mesmo tempo simples o bastante para ser implementado em C em microcontroladores com recursos limitados.
O uso eficiente do PID exige três pilares fundamentais:
- Modelagem mínima da planta — mesmo aproximações simples (primeira ordem) já permitem prever comportamento e ajustar expectativas.
- Sintonia adequada dos ganhos — métodos manuais, Ziegler–Nichols ou heurísticos específicos do tipo de sistema permitem ajustar o equilíbrio entre agressividade e estabilidade.
- Implementação robusta — indispensável em aplicações reais: saturação, anti-windup e filtragem derivativa evitam problemas comuns como oscilações, ruído amplificado e demora para recuperar o controle.
Controladores mais simples como P, PI e ON–OFF têm seu valor: em sistemas lentos, ruidosos ou economicamente restritos, são frequentemente suficientes. Já aplicações mais exigentes, como robótica, veículos autônomos, power electronics e sistemas de alta precisão, beneficiam-se do PID completo com técnicas adicionais de estabilização.
O conhecimento apresentado aqui é suficiente para que você:
- Implemente com segurança um PID em qualquer microcontrolador
- Simule a planta e prever a resposta
- Compare e escolher o tipo de controlador adequado
- Ajuste o comportamento do sistema conforme requisitos reais
Com isso, você está pronto para aplicar controle PID com confiança em projetos profissionais, acadêmicos e industriais.