
Aprenda a projetar um filtro digital para separar a frequência fundamental e as harmônicas de um assobio humano utilizando Séries de Taylor em microcontroladores. Este artigo técnico e didático apresenta,
Categoria: Algoritimos
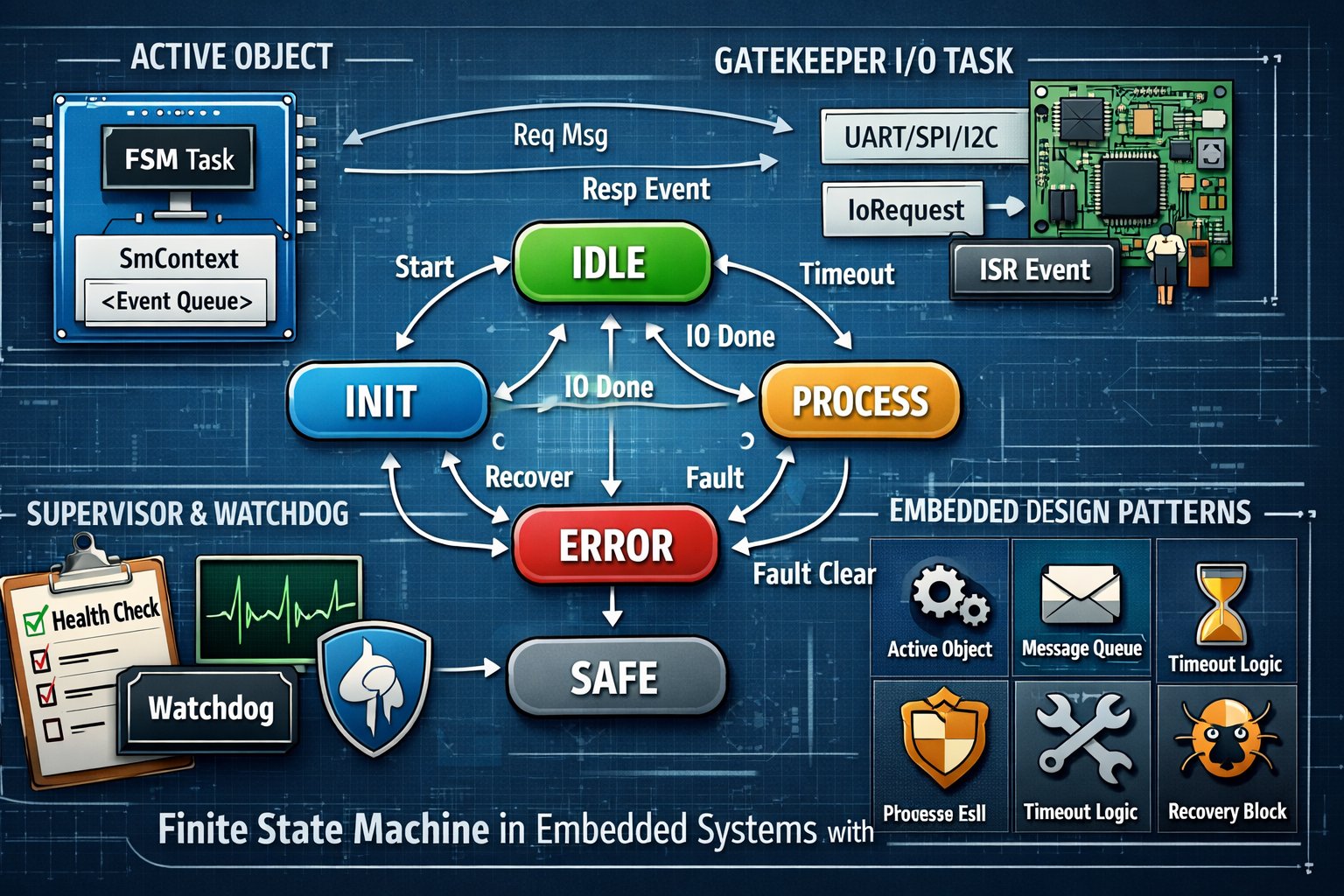
Máquina de Estados em Sistemas Embarcados com FreeRTOS: Projeto Cíclico, Recuperável e Orientado a EventosMáquina de Estados em Sistemas Embarcados com FreeRTOS: Projeto Cíclico, Recuperável e Orientado a Eventos
Aprenda como projetar Máquinas de Estados robustas para sistemas embarcados usando FreeRTOS. Este artigo apresenta uma abordagem prática e profissional para construir firmware cíclico e recuperável, utilizando duas threads cooperativas,
WCET (Worst Case Execution Time) em FreeRTOS e ZephyrWCET (Worst Case Execution Time) em FreeRTOS e Zephyr
Entenda em profundidade o conceito de WCET (Worst Case Execution Time) e sua aplicação prática em sistemas de tempo real baseados em FreeRTOS e Zephyr. Este artigo apresenta, de forma
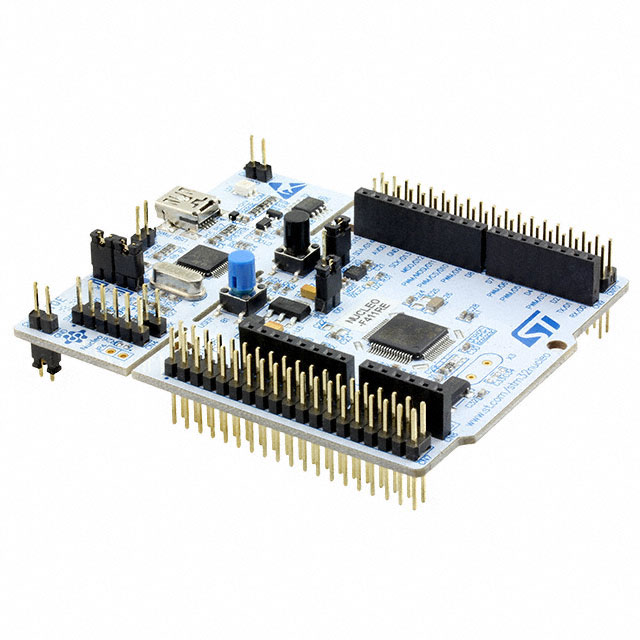
Como Redirecionar o printf para a UART no STM32F411: Um Guia Completo para Debug SerialComo Redirecionar o printf para a UART no STM32F411: Um Guia Completo para Debug Serial
Este tutorial apresenta um guia completo, didático e detalhado sobre como redirecionar a função printf para a UART no microcontrolador STM32F411, utilizando a placa Nucleo e o ambiente STM32CubeIDE. Explicamos
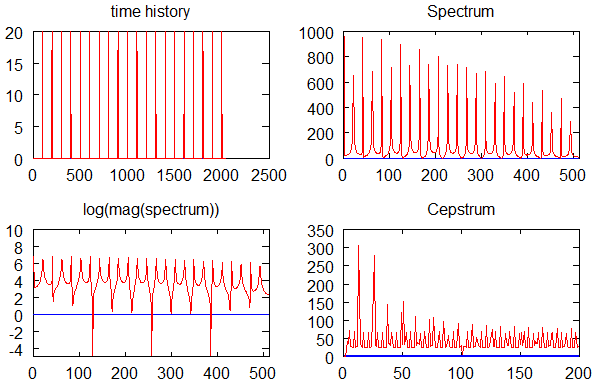
Quefrequência e Análise Cepstral: Uma Introdução Prática para Sistemas Embarcados (ESP32-P4)Quefrequência e Análise Cepstral: Uma Introdução Prática para Sistemas Embarcados (ESP32-P4)
A análise cepstral e o conceito de quefrequência são técnicas essencialmente poderosas no processamento de sinais de áudio, permitindo separar efeitos de excitação, resposta acústica e periodicidades espectrais que não

Detecção de Anomalias em Sistemas Embarcados: Isolation Forest, One-Class SVM e PCA com Exemplos PráticosDetecção de Anomalias em Sistemas Embarcados: Isolation Forest, One-Class SVM e PCA com Exemplos Práticos
A detecção de anomalias é uma técnica essencial em sistemas embarcados modernos, permitindo identificar falhas, prever problemas e garantir maior confiabilidade em aplicações industriais, IoT e automação. Este artigo explica,
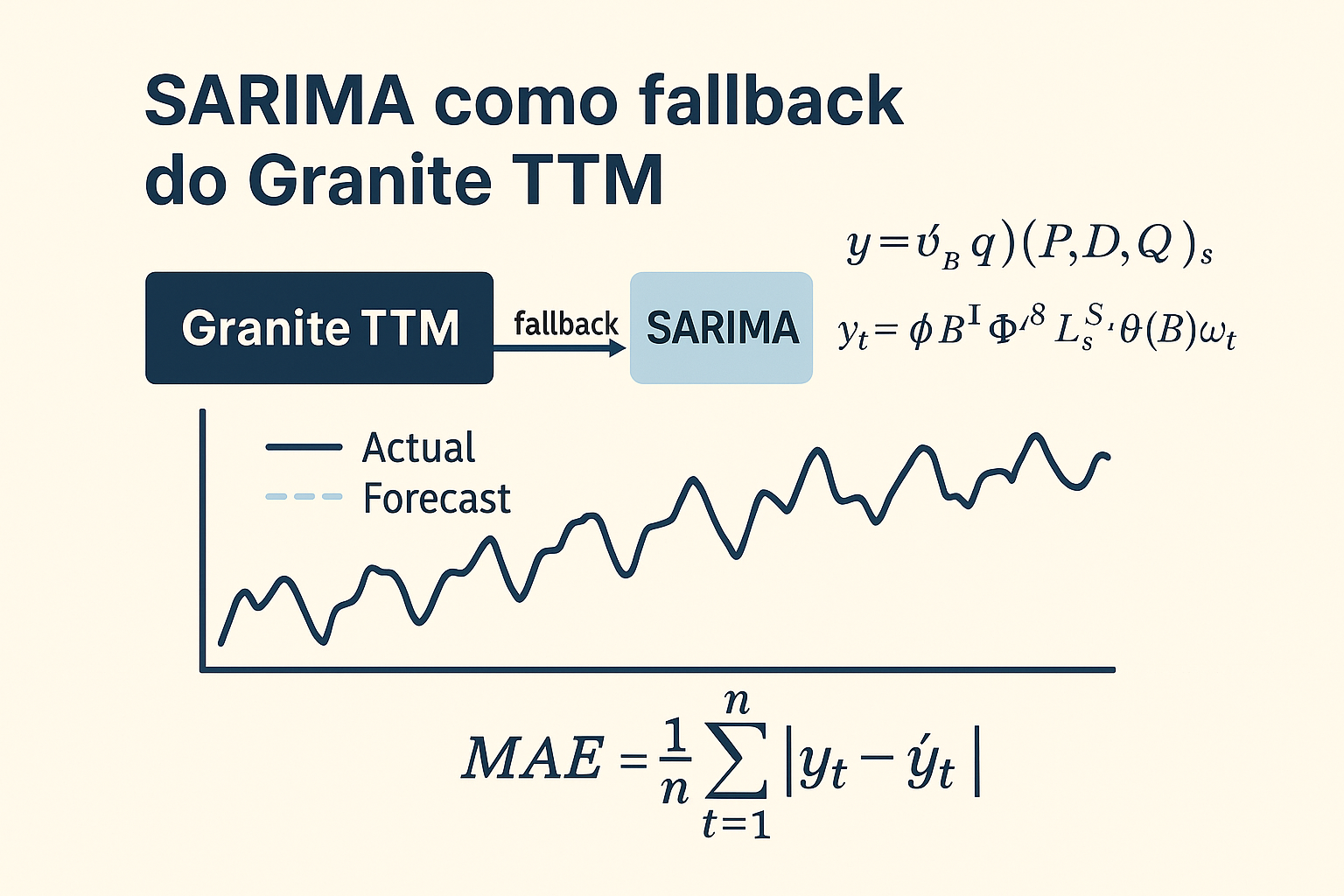
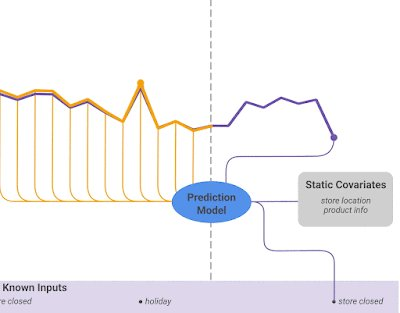
Modelo SARIMA como Fallback do Granite TTM: Análise, Funcionamento e Uso do MAE no Projeto de TCC Rack Inteligente para o EmbarcaTech TIC-27Modelo SARIMA como Fallback do Granite TTM: Análise, Funcionamento e Uso do MAE no Projeto de TCC Rack Inteligente para o EmbarcaTech TIC-27
Este artigo explica de forma didática e tecnicamente rigorosa como o modelo SARIMA é utilizado como fallback do Granite TTM no projeto de conclusão do EmbarcaTech TIC-27, realizado em 2025.
Análise e Previsão de Séries Históricas: Métodos Clássicos, Modelos Modernos e Aplicações no Projeto Embarcatech 2025Análise e Previsão de Séries Históricas: Métodos Clássicos, Modelos Modernos e Aplicações no Projeto Embarcatech 2025
A previsão de séries históricas é um dos pilares da inteligência computacional aplicada a sistemas embarcados, IoT e análise de dados. Este artigo, desenvolvido como parte do Projeto Final do
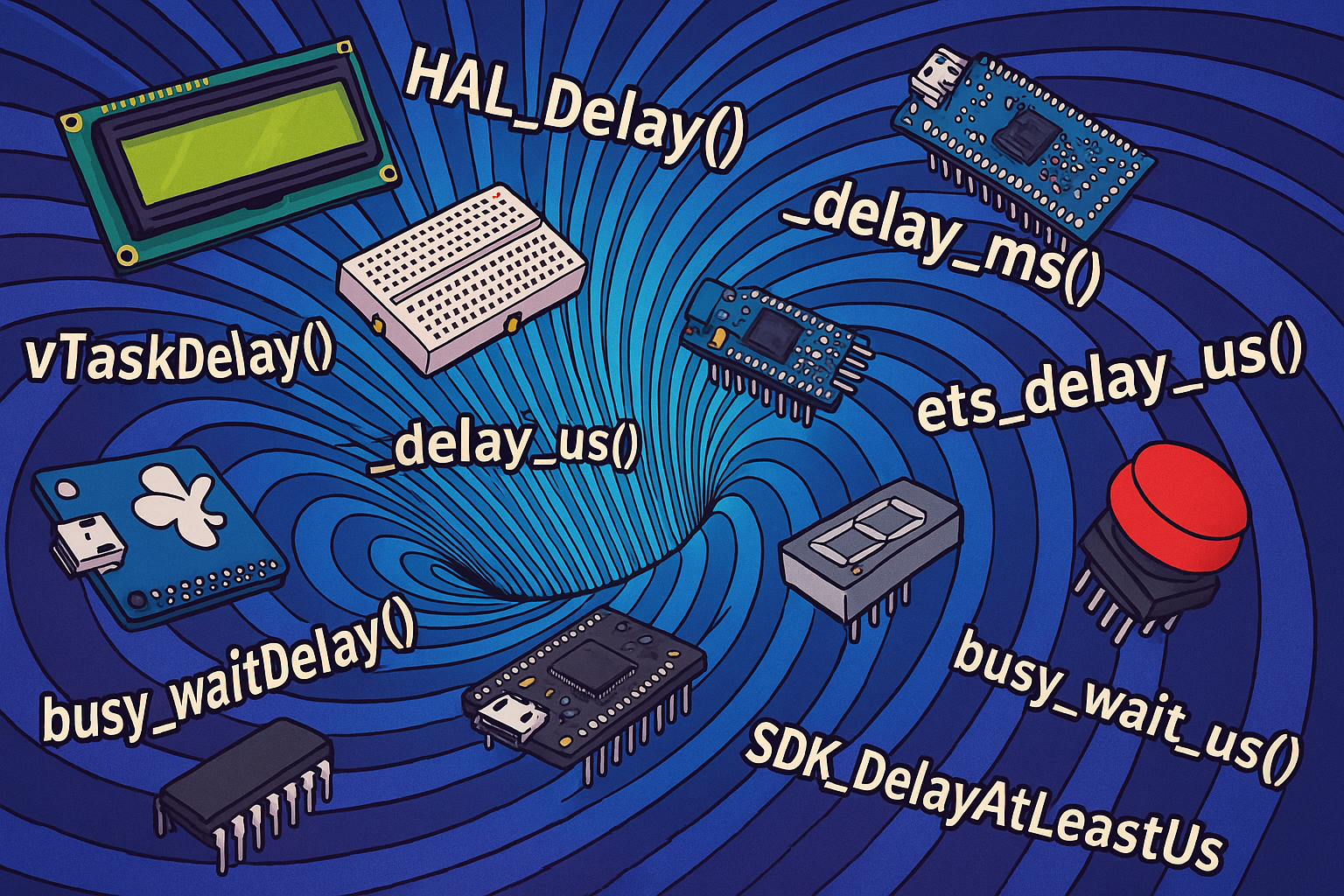
Funções de Delay em Microcontroladores: Comparação Completa entre RP2040, ESP32, STM32, AVR, NXP e RenesasFunções de Delay em Microcontroladores: Comparação Completa entre RP2040, ESP32, STM32, AVR, NXP e Renesas
As funções de delay são essenciais no desenvolvimento de firmware, mas cada microcontrolador implementa temporizações de forma distinta, afetando precisão, consumo de energia, multitarefa e estabilidade do sistema. Este artigo

Sistema de Ronda com OneWire e iButton DS1904 usando ESP32: Implementação Completa, Multithread e à Prova de FalhasSistema de Ronda com OneWire e iButton DS1904 usando ESP32: Implementação Completa, Multithread e à Prova de Falhas
Este artigo apresenta uma implementação completa e profissional de um sistema de ronda baseado no barramento OneWire e no iButton DS1904, utilizando o microcontrolador ESP32 com FreeRTOS. Explicamos de forma