HIL em sistemas embarcados e sistemas de tempo real
Quando falamos de Hardware in the Loop, estamos quase sempre falando também de sistemas embarcados e sistemas de tempo real. Isso acontece porque o controlador que está sendo testado normalmente não é um software comum rodando em um computador de uso geral. Ele costuma ser um firmware, uma ECU, um CLP, uma placa com microcontrolador, um DSP, um FPGA ou um controlador industrial dedicado.
E aqui precisamos fazer uma distinção importante.
Um sistema embarcado é um sistema computacional dedicado a uma função específica dentro de um equipamento maior. Ele não existe para ser um computador genérico, como um notebook ou servidor. Ele existe para controlar, medir, acionar, proteger, comunicar ou supervisionar algo do mundo físico.
Um microcontrolador dentro de uma fonte chaveada, uma ECU automotiva, um controlador de motor, um CLP em uma linha industrial, um BMS de bateria, um módulo de controle de temperatura ou um controlador de robô são exemplos típicos.
Em sistemas embarcados, o software não vive isolado.
Ele conversa com sensores, atua sobre cargas, reage a eventos e precisa respeitar limites físicos.
Agora entra o segundo conceito: tempo real.
Muita gente imagina que tempo real significa “muito rápido”. Mas não é exatamente isso. Um sistema de tempo real é aquele em que a resposta precisa acontecer dentro de um prazo definido. O resultado correto entregue tarde demais pode ser considerado errado.
Pense em um airbag. Não adianta o cálculo estar correto se a resposta chegar depois do impacto. Pense em uma proteção contra sobrecorrente. Não adianta detectar o problema quando o transistor já queimou. Pense em uma esteira industrial com intertravamento de segurança. Não adianta parar depois que o operador já foi exposto ao risco.
Tempo real não é apenas velocidade.
Tempo real é previsibilidade.
Essa ideia é essencial para entender por que o HIL é tão importante. Em um teste puramente lógico, talvez você consiga verificar se o algoritmo toma a decisão correta. Mas em um sistema embarcado real, você também precisa saber quando essa decisão é tomada.
O controlador leu o sensor no instante certo?
A interrupção foi atendida dentro do prazo?
O PWM foi atualizado corretamente?
A comunicação industrial sofreu atraso?
O watchdog foi reiniciado na hora certa?
A proteção atuou antes do limite crítico?
Essas perguntas não aparecem com tanta clareza em uma simulação comum. Elas aparecem quando o hardware real entra no laço.
Em uma bancada HIL, o controlador executa o firmware real, com seu clock real, seus periféricos reais, suas interrupções reais, sua pilha de comunicação real e suas limitações reais. O simulador precisa responder dentro do mesmo ritmo esperado pelo sistema físico.
Se o controlador espera amostras de corrente a cada 100 microssegundos, o simulador precisa fornecer essas amostras nesse intervalo. Se um CLP executa seu ciclo de varredura a cada poucos milissegundos, o ambiente HIL precisa entregar entradas e receber saídas de forma coerente com esse ciclo. Se uma ECU automotiva troca mensagens CAN em períodos rígidos, o simulador precisa respeitar essa temporização.
Essa é a diferença entre “testar código” e “testar comportamento embarcado”.
4.1 O firmware real diante de uma planta simulada
Vamos imaginar um controlador de motor baseado em microcontrolador. O firmware possui leitura de ADC, controle PWM, interrupções de temporizador, cálculo de controle, comunicação serial e proteção contra falhas.
Em um teste comum de software, poderíamos alimentar funções com valores simulados e verificar se as saídas fazem sentido. Isso é útil, mas incompleto. No HIL, o firmware roda no hardware verdadeiro. O ADC pode receber sinais gerados por um simulador. O PWM pode ser medido pelo sistema HIL. As entradas digitais podem ser alteradas em tempo real. A comunicação pode ser monitorada e perturbada.
O controlador não está apenas executando uma função isolada. Ele está vivendo um ciclo parecido com o ciclo real de operação.
Esse ponto é fundamental para sistemas embarcados porque muitos defeitos só aparecem na integração entre software, hardware e tempo. Por exemplo:
- uma interrupção pode atrasar outra;
- uma rotina de comunicação pode bloquear uma tarefa crítica;
- uma leitura analógica pode sofrer ruído;
- uma proteção pode depender de uma sequência específica de eventos;
- uma máquina de estados pode entrar em uma condição não prevista;
- uma tarefa de baixa prioridade pode consumir tempo demais;
- uma falha intermitente pode aparecer apenas sob carga.
O HIL cria um ambiente onde essas situações podem ser provocadas, repetidas e medidas.
4.2 O papel das máquinas de estado
Em muitos sistemas embarcados, o comportamento do firmware é organizado por máquinas de estado. Isso aparece em CLPs, controladores de motor, carregadores de bateria, fontes chaveadas digitais, equipamentos médicos, robôs e sistemas industriais.
Uma máquina de estado define modos de operação, eventos e transições. Por exemplo:
- desligado;
- inicializando;
- aguardando comando;
- operando;
- em falha;
- em emergência;
- recuperando;
- manutenção.
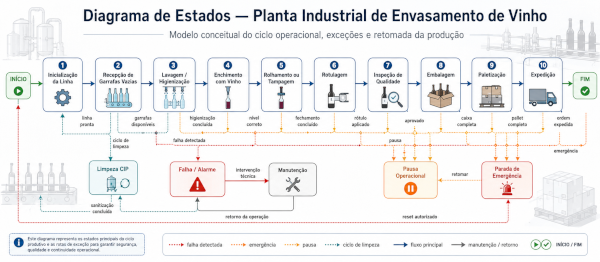
Em HIL, podemos testar se essas transições ocorrem corretamente. O que acontece se o sensor falhar durante a partida? O sistema vai para falha? Tenta recuperar? Desliga a saída? Aciona alarme? Bloqueia religamento? Registra evento?
Essa abordagem combina muito bem com sistemas embarcados porque o comportamento reativo é uma das características centrais desse tipo de software. O sistema espera eventos, reage, muda de estado e continua operando.
Uma bancada HIL bem configurada permite perguntar:
“em que estado o sistema entra quando o mundo ao redor começa a se comportar mal?”
Essa pergunta é valiosa. Muitos defeitos graves não aparecem durante a operação ideal, mas durante transições, falhas, partidas, paradas, retomadas e condições-limite.
4.3 Testes de tempo, carga e desempenho
Outro ponto importante é o teste de desempenho. Em sistemas embarcados, desempenho não é apenas “usar menos CPU”. É garantir que todas as tarefas críticas sejam executadas dentro do prazo.
Em uma aplicação com RTOS, por exemplo, podemos ter tarefas de controle, comunicação, diagnóstico, registro de dados e interface. Cada uma possui prioridade e período. Se uma tarefa demora demais, outra pode perder prazo. Se uma fila enche, mensagens podem ser descartadas. Se uma interrupção ocorre com frequência excessiva, o sistema pode ficar instável.
O HIL permite criar cenários de carga para observar esse comportamento. Podemos aumentar a frequência de eventos, simular ruído em sensores, forçar mensagens de rede, criar falhas sucessivas, provocar mudanças rápidas na planta e medir como o controlador reage.
Esse tipo de teste é especialmente importante em sistemas de tempo real porque o comportamento correto depende da combinação entre lógica e temporização.
Em sistemas embarcados, um bug pode não estar no cálculo.
Pode estar no instante em que o cálculo acontece.
4.4 Segurança e confiabilidade
HIL também se relaciona diretamente com segurança e confiabilidade. Quando um sistema controla energia, movimento, temperatura, pressão, velocidade ou potência, uma falha pode causar dano ao equipamento ou risco às pessoas.
Por isso, sistemas embarcados frequentemente usam mecanismos como watchdog, redundância, checagem de sanidade, CRC, autoteste, diagnósticos, limites de operação, estados seguros e tratamento de falhas.
Em uma bancada HIL, esses mecanismos podem ser exercitados de forma controlada. Podemos perguntar:
- o watchdog atua se o firmware travar?
- o sistema detecta sensor incoerente?
- o controlador rejeita comando perigoso?
- a saída entra em estado seguro?
- o alarme é gerado corretamente?
- a falha fica registrada?
- o sistema permite religamento indevido?
- a proteção atua dentro do tempo esperado?
Esse tipo de teste é difícil de fazer apenas com simulação pura. Também pode ser perigoso ou caro demais em uma planta real. O HIL ocupa justamente esse espaço intermediário: mais realista que uma simulação simples e mais seguro que testar diretamente na máquina final.
4.5 HIL como ponte entre desenvolvimento e campo
Uma das maiores contribuições do HIL é reduzir a distância entre a mesa do desenvolvedor e o ambiente real de operação.
No desenvolvimento tradicional, muitas falhas só aparecem quando o controlador é instalado no equipamento final. Isso gera retrabalho, deslocamento técnico, parada de máquina, correções apressadas e risco de introduzir novos erros.
Com HIL, parte significativa desses problemas pode ser antecipada. O firmware ou programa do CLP passa por um conjunto de cenários antes de chegar ao campo. Isso não elimina totalmente o teste real, mas reduz surpresas.
Pense no HIL como uma conversa antecipada entre o controlador e o mundo físico.
O mundo físico ainda não está ali por completo, mas suas principais características já estão representadas: sinais, atrasos, limites, falhas, cargas, respostas dinâmicas e estados operacionais.
É por isso que o HIL se encaixa tão bem no desenvolvimento moderno de sistemas embarcados. Ele permite validar mais cedo, testar melhor, repetir cenários, automatizar verificações e construir sistemas mais confiáveis.
Em resumo:
HIL é uma técnica de validação especialmente poderosa porque coloca o hardware real diante de um mundo simulado, mas temporalmente exigente.
E quando o assunto é sistema embarcado, essa combinação é decisiva.

