Introdução ao Debug, Tracing e Análise Temporal em Sistemas com FreeRTOS
Em sistemas embarcados baseados em FreeRTOS, depurar erros não se resume a encontrar falhas de compilação ou exceções evidentes. Grande parte dos problemas ocorre em tempo de execução, manifestando-se como jitter, starvation, deadlocks, priority inversion, violações de deadlines e consumo excessivo de stack ou heap. Nesse contexto, técnicas como debug estruturado, tracing, análise temporal e watermarking tornam-se fundamentais para garantir previsibilidade e robustez.
O FreeRTOS fornece, nativamente, uma série de ganchos (hooks), APIs de monitoramento e instrumentação leve, permitindo observar o comportamento interno do escalonador, das tarefas e dos recursos de sincronização. Quando bem utilizadas, essas ferramentas permitem responder perguntas críticas como: qual tarefa está monopolizando a CPU?, onde ocorre a maior latência?, qual o pior tempo de execução (WCET – Worst Case Execution Time)?, quanto de stack realmente está sendo usado?
A análise temporal em FreeRTOS está intimamente ligada ao conceito de sistemas de tempo real, onde não basta “funcionar”, é necessário funcionar dentro de limites temporais bem definidos. Para isso, combinamos métricas de tempo, eventos do kernel, estados das tarefas e uso de recursos. O tracing permite observar a sequência de eventos do sistema; o watermark revela margens de segurança; e o task monitor consolida essas informações de forma sistemática.
Ao longo deste artigo, vamos explorar como instrumentar o FreeRTOS para debug eficiente, como habilitar e interpretar tracing, como realizar análise temporal prática, e como usar watermark de stack e heap para validar a saúde do sistema. Todos os conceitos serão acompanhados de exemplos de código em C, prontos para uso em microcontroladores STM32, ESP32 ou equivalentes.
Pré-requisitos práticos considerados
Este artigo assume que o leitor já possui:
- Um projeto funcional com FreeRTOS
- Familiaridade com tarefas (
xTaskCreate) - Uso básico de
vTaskDelay, semáforos ou filas - Ambiente de debug com GDB, OpenOCD ou equivalente
Perfeito. Dando continuidade, seguimos com a Seção 2, entrando agora no debug estruturado em FreeRTOS, que é a base para todo o restante (tracing, análise temporal e watermark).
Debug em FreeRTOS: Hooks, Assertivas e Instrumentação do Kernel
O debug em sistemas embarcados com FreeRTOS deve ser encarado como uma atividade de engenharia, não apenas como um recurso emergencial quando algo “para de funcionar”. Diferente de aplicações desktop, onde exceções e logs abundantes são comuns, em sistemas de tempo real o debug precisa ser determinístico, de baixo overhead e previsível. O FreeRTOS foi projetado com essa filosofia e oferece mecanismos específicos para isso.
Um dos pilares do debug em FreeRTOS são os hooks do kernel, que são funções fracas (weak) chamadas automaticamente pelo sistema em eventos críticos. Esses hooks permitem capturar falhas graves logo no momento em que ocorrem, antes que o sistema entre em estados inconsistentes ou silenciosamente incorretos. Entre os mais importantes estão vApplicationMallocFailedHook, vApplicationStackOverflowHook, vApplicationIdleHook e vApplicationTickHook.
O hook de falha de alocação (vApplicationMallocFailedHook) é acionado quando uma chamada a pvPortMalloc() falha. Em sistemas embarcados, isso geralmente indica erro de dimensionamento do heap ou fragmentação excessiva. Um erro comum é ignorar esse hook, permitindo que o sistema continue executando com ponteiros nulos. A prática correta é interromper a execução ou registrar o evento imediatamente.
void vApplicationMallocFailedHook(void)
{
taskDISABLE_INTERRUPTS();
for (;;)
{
/* Aqui pode-se acionar um LED, log via UART ou breakpoint */
}
}
Outro mecanismo essencial é o hook de stack overflow, ativado quando configCHECK_FOR_STACK_OVERFLOW está habilitado. Esse recurso é crucial porque estouros de stack são uma das principais causas de comportamento errático em FreeRTOS. O kernel detecta quando a stack ultrapassa seus limites e chama vApplicationStackOverflowHook.
void vApplicationStackOverflowHook(TaskHandle_t xTask, char *pcTaskName)
{
(void)xTask;
(void)pcTaskName;
taskDISABLE_INTERRUPTS();
for (;;)
{
/* Breakpoint aqui revela exatamente qual task falhou */
}
}
Além dos hooks, o FreeRTOS fornece um sistema de assertivas internas através do macro configASSERT(). Diferente de um assert() tradicional da linguagem C, o configASSERT() pode ser redirecionado para uma função customizada, permitindo capturar falhas de lógica do kernel ou da aplicação de forma controlada. É altamente recomendado mantê-lo habilitado durante o desenvolvimento.
#define configASSERT(x) if ((x) == 0) vAssertCalled(__FILE__, __LINE__)
void vAssertCalled(const char *file, int line)
{
taskDISABLE_INTERRUPTS();
for (;;)
{
/* Inspecione file e line no debugger */
}
}
Essas assertivas são particularmente úteis para detectar erros como uso de APIs do FreeRTOS em contexto incorreto (por exemplo, chamar funções não seguras dentro de uma ISR) ou parâmetros inválidos em chamadas de sistema.
Outro aspecto importante do debug é a instrumentação manual das tarefas. Em vez de usar printf indiscriminadamente — o que pode introduzir latência e jitter — é comum empregar contadores, flags e timestamps obtidos via xTaskGetTickCount() ou timers de hardware. Isso permite medir tempos de execução e frequência de chamadas sem comprometer o escalonamento.
void vTaskExample(void *pvParameters)
{
TickType_t lastWake = xTaskGetTickCount();
for (;;)
{
/* Código crítico */
TickType_t start = xTaskGetTickCount();
/* Processamento */
TickType_t elapsed = xTaskGetTickCount() - start;
/* elapsed pode ser analisado no debugger */
vTaskDelayUntil(&lastWake, pdMS_TO_TICKS(10));
}
}
Essa abordagem é o primeiro passo para a análise temporal, pois cria pontos de observação explícitos no código, alinhados com o escalonador do FreeRTOS. Mais adiante, veremos como esse tipo de instrumentação se integra com ferramentas de tracing e com o task monitor para obter uma visão global do sistema.
Tracing em FreeRTOS: Eventos, Estados de Tarefa e Linha do Tempo do Sistema
O tracing em FreeRTOS é a técnica que permite observar, em ordem temporal, o que realmente acontece dentro do kernel: mudanças de estado das tarefas, preempções, bloqueios, desbloqueios, interrupções e uso de recursos de sincronização. Enquanto o debug tradicional responde “onde o sistema travou”, o tracing responde “como o sistema chegou até aqui”. Em sistemas de tempo real, essa diferença é fundamental.
O FreeRTOS implementa tracing por meio de macros de instrumentação, que são pontos estratégicos inseridos no kernel e acionados sempre que eventos relevantes ocorrem. Essas macros não fazem nada por padrão; elas apenas fornecem ganchos para que o desenvolvedor ou uma ferramenta externa capture os eventos. Isso garante que o kernel permaneça leve e portável, sem impor overhead quando o tracing não está habilitado.
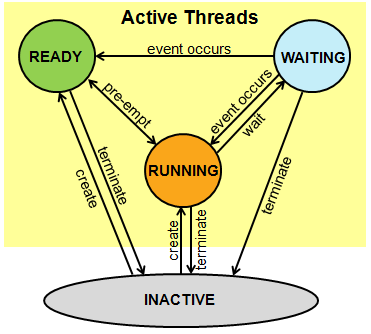
Entre os eventos rastreáveis estão: criação e exclusão de tarefas, troca de contexto (context switch), entrada e saída de estados como Ready, Running, Blocked e Suspended, acesso a filas, semáforos e mutexes, além da entrada e saída de interrupções. Essa visão temporal permite identificar problemas clássicos como priority inversion, starvation, excesso de preempções e tarefas que executam além do tempo esperado.
No nível mais básico, o tracing pode ser feito usando os próprios trace macros do FreeRTOS, como traceTASK_SWITCHED_IN e traceTASK_SWITCHED_OUT. Ao redefinir essas macros no FreeRTOSConfig.h, é possível registrar eventos sempre que o escalonador troca de tarefa.
#define traceTASK_SWITCHED_IN() \
traceTaskSwitchedIn(pxCurrentTCB->pcTaskName)
void traceTaskSwitchedIn(const char *taskName)
{
/* Pode-se gravar timestamp, incrementar contador ou sinalizar GPIO */
}
Uma técnica comum em ambientes embarcados restritos é usar um pino GPIO como marcador temporal. Ao alternar o estado do pino na entrada ou saída de uma tarefa, é possível observar o comportamento do sistema em um analisador lógico ou osciloscópio, obtendo uma linha do tempo extremamente precisa, limitada apenas pelo clock do periférico.
#define traceTASK_SWITCHED_IN() GPIO_SetPin(DEBUG_PIN)
#define traceTASK_SWITCHED_OUT() GPIO_ClearPin(DEBUG_PIN)
Essa abordagem é especialmente útil para análise de jitter e latência em sistemas hard real-time, onde ferramentas gráficas de tracing nem sempre estão disponíveis ou são viáveis.
Em sistemas mais complexos, o tracing pode ser integrado a ferramentas dedicadas, como Percepio Tracealyzer, SEGGER SystemView ou soluções customizadas via RTT, SWO ou UART. Nessas abordagens, os eventos do kernel são armazenados em um buffer circular e transmitidos para o host, permitindo visualizar graficamente a execução do sistema ao longo do tempo, com resolução de microssegundos.
Independentemente da ferramenta utilizada, o princípio é o mesmo: o kernel gera eventos, as tarefas são identificadas por IDs e nomes, e cada evento recebe um timestamp. A partir disso, é possível reconstruir a linha do tempo completa do sistema e responder perguntas como: qual tarefa preemptou qual, quanto tempo uma tarefa ficou bloqueada, quanto tempo o sistema passou em idle.
Um ponto importante é que o tracing deve ser encarado como instrumentação temporária ou controlada. Embora o FreeRTOS permita tracing com overhead relativamente baixo, qualquer forma de instrumentação altera o comportamento temporal do sistema. Por isso, em projetos críticos, é comum habilitar tracing apenas em builds de diagnóstico ou em versões específicas de firmware.
O tracing também se integra diretamente ao task monitor, pois fornece dados quantitativos que podem ser correlacionados com métricas como tempo de CPU por tarefa, frequência de execução e latência de resposta. Na próxima seção, veremos como essas informações podem ser consolidadas por meio da análise temporal, focando em deadlines, jitter e tempo de execução.
Análise Temporal em FreeRTOS: WCET, Jitter, Deadlines e Latência
A análise temporal em sistemas baseados em FreeRTOS tem como objetivo verificar se o sistema cumpre seus requisitos de tempo, não apenas em condições ideais, mas também nos piores cenários possíveis. Em sistemas de tempo real, especialmente industriais, automotivos e médicos, um software correto que falha no tempo é considerado incorreto. Por isso, métricas temporais são tão importantes quanto a funcionalidade.
Um dos conceitos centrais é o WCET (Worst Case Execution Time), ou tempo máximo de execução de uma tarefa. No FreeRTOS, o WCET não é imposto automaticamente pelo kernel; cabe ao engenheiro medi-lo, estimá-lo e validá-lo. O tracing e a instrumentação temporal permitem medir quanto tempo uma tarefa leva para executar em diferentes cenários e identificar o pior caso observado.
Uma abordagem prática para medir WCET é utilizar timestamps antes e depois do trecho crítico da tarefa, usando o contador de ticks do RTOS ou um timer de hardware de maior resolução. O valor máximo observado ao longo do tempo fornece uma estimativa empírica do WCET.
void vControlTask(void *pvParameters)
{
uint32_t maxExecTime = 0;
for (;;)
{
uint32_t start = xTaskGetTickCount();
/* Código crítico de controle */
uint32_t execTime = xTaskGetTickCount() - start;
if (execTime > maxExecTime)
{
maxExecTime = execTime;
}
vTaskDelay(pdMS_TO_TICKS(10));
}
}
Embora essa técnica seja simples, ela já permite identificar tarefas que ocasionalmente extrapolam seu tempo esperado, muitas vezes devido a acesso a recursos compartilhados, cache misses, interrupções ou dependência de periféricos lentos.
Outro conceito fundamental é o jitter, que representa a variação no tempo de execução ou no instante de ativação de uma tarefa periódica. Mesmo que uma tarefa execute dentro do WCET, variações excessivas no tempo de início podem comprometer sistemas de controle, comunicação ou aquisição de sinais. Em FreeRTOS, o uso correto de vTaskDelayUntil() é essencial para minimizar jitter, pois ele sincroniza a tarefa com um relógio absoluto.
void vPeriodicTask(void *pvParameters)
{
TickType_t lastWakeTime = xTaskGetTickCount();
for (;;)
{
/* Processamento periódico */
vTaskDelayUntil(&lastWakeTime, pdMS_TO_TICKS(5));
}
}
Ao combinar vTaskDelayUntil() com tracing, é possível observar se a tarefa está sendo acordada no instante esperado ou se está sofrendo atrasos devido à preempção por tarefas de maior prioridade ou por interrupções longas. Essa análise é crucial para identificar violação de deadlines.
O deadline é o instante máximo em que uma tarefa deve concluir sua execução. FreeRTOS não possui um mecanismo nativo de deadlines explícitos, como alguns RTOS acadêmicos, mas eles podem ser implementados conceitualmente por meio de análise temporal e monitoramento. Uma técnica comum é comparar o tempo de execução acumulado com o período da tarefa.
if (execTime > DEADLINE_TICKS)
{
/* Violação de deadline detectada */
}
Já a latência, especialmente a latência de resposta a eventos externos, depende da soma de vários fatores: tempo de interrupção, tempo até o escalonador rodar, prioridade da tarefa associada ao evento e tempo até a tarefa obter os recursos necessários. O tracing de ISRs (Interrupt Service Routines) combinado com tracing de tarefas permite medir essa latência de ponta a ponta, algo essencial em sistemas reativos.
É importante destacar que a análise temporal não deve ser feita isoladamente. Ela precisa ser correlacionada com o uso de CPU por tarefa, com o estado das filas e semáforos, e com o comportamento do Idle Task. Essa visão integrada é o que permite identificar gargalos reais e não apenas sintomas pontuais.
Na próxima seção, veremos como o conceito de watermark entra exatamente nesse ponto: ele fornece margens de segurança quantitativas, especialmente relacionadas ao uso de stack e heap, complementando a análise temporal com uma visão de robustez estrutural do sistema.
Watermark em FreeRTOS: Stack, Heap e Margens de Segurança em Tempo de Execução
O conceito de watermark em sistemas embarcados refere-se à medição da menor margem já atingida por um recurso ao longo da execução do sistema. Em FreeRTOS, o watermark é amplamente utilizado para avaliar o uso real de stack e heap, permitindo verificar se o dimensionamento realizado em projeto é adequado ou excessivamente otimista. Diferente de medições instantâneas, o watermark revela o pior caso observado, o que é fundamental para sistemas de tempo real.
No caso da stack, cada tarefa em FreeRTOS possui uma área de memória privada, cujo tamanho é definido no momento da criação da tarefa. Subdimensionar essa área pode levar a corrupção de memória e falhas difíceis de diagnosticar; superdimensioná-la reduz a memória disponível para o restante do sistema. Para resolver esse dilema, o FreeRTOS preenche a stack das tarefas com um padrão conhecido durante a criação e monitora, em tempo de execução, até onde esse padrão foi sobrescrito.
A API uxTaskGetStackHighWaterMark() permite consultar o menor espaço livre já observado na stack de uma tarefa. Esse valor é retornado em palavras (não em bytes) e indica a margem de segurança efetiva.
void vMonitorTask(void *pvParameters)
{
for (;;)
{
UBaseType_t watermark =
uxTaskGetStackHighWaterMark(NULL);
/* watermark indica quantas palavras ainda não foram usadas */
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
Se o watermark estiver próximo de zero, significa que a tarefa já utilizou quase toda a stack disponível, indicando risco iminente de overflow. Uma prática recomendada é manter uma margem de segurança confortável, especialmente em tarefas que utilizam chamadas de função profundas, variáveis locais grandes ou bibliotecas externas.
O mesmo conceito se aplica ao heap, embora de forma menos direta. Dependendo do gerenciador de heap configurado (heap_1 a heap_5), o FreeRTOS fornece funções como xPortGetFreeHeapSize() e xPortGetMinimumEverFreeHeapSize(). Esta última é particularmente importante, pois representa o watermark do heap — ou seja, o menor valor de heap livre já registrado desde o boot.
size_t minHeap = xPortGetMinimumEverFreeHeapSize();
Esse valor permite avaliar se o sistema já esteve próximo da exaustão de memória dinâmica, mesmo que no momento atual o heap pareça saudável. Isso é essencial para detectar picos de alocação transitórios, comuns em sistemas que utilizam filas dinâmicas, buffers temporários ou stacks criadas e destruídas dinamicamente.
O uso de watermark também se estende à análise temporal, pois falta de memória frequentemente se manifesta como aumento de latência, bloqueios inesperados ou falhas silenciosas em alocações. Correlacionar watermark de heap com tracing de eventos de alocação fornece uma visão clara de como o uso de memória impacta o comportamento temporal do sistema.
Uma abordagem avançada é integrar a leitura de watermarks em uma tarefa de monitoramento dedicada, responsável por consolidar informações de stack, heap, tempo de execução e estados das tarefas. Essa tarefa pode, por exemplo, sinalizar alertas via UART, armazenar dados em memória não volátil ou enviar métricas para um sistema externo.
void vSystemHealthTask(void *pvParameters)
{
for (;;)
{
/* Leitura de stack das tasks */
/* Leitura de heap mínimo */
/* Registro de eventos críticos */
vTaskDelay(pdMS_TO_TICKS(2000));
}
}
Essa estratégia transforma o watermark de uma simples ferramenta de debug em um mecanismo de observabilidade contínua, essencial em sistemas embarcados modernos, especialmente aqueles conectados (IIoT, edge computing).
Na próxima seção, veremos como consolidar tudo isso usando o Task Monitor, integrando debug, tracing, análise temporal e watermark em uma visão única e operacional do sistema.
Task Monitor em FreeRTOS: Observabilidade, Métricas e Diagnóstico em Tempo de Execução
O Task Monitor não é um componente único do FreeRTOS, mas sim um conjunto de técnicas e APIs que permitem observar, em tempo de execução, o estado global do sistema. Ele atua como uma camada de observabilidade, consolidando informações de debug, tracing, análise temporal e watermark em métricas compreensíveis e acionáveis. Em sistemas embarcados bem projetados, o task monitor deixa de ser apenas uma ferramenta de desenvolvimento e passa a integrar a própria arquitetura do firmware.
O FreeRTOS fornece APIs nativas para inspeção das tarefas, como uxTaskGetNumberOfTasks(), uxTaskGetSystemState() e vTaskList(). Essas funções permitem obter uma fotografia do sistema: quais tarefas existem, seus estados atuais, prioridades, uso de stack e tempo de CPU consumido. Quando combinadas com uma tarefa dedicada de monitoramento, essas informações se tornam extremamente poderosas.
A função vTaskList() gera uma tabela textual contendo o estado das tarefas, o que é útil para debug via UART ou RTT. Embora simples, essa função já revela problemas clássicos como tarefas permanentemente bloqueadas, starvation ou prioridades mal dimensionadas.
char buffer[512];
vTaskList(buffer);
/* Enviar buffer via UART */
Para análises mais profundas, a API uxTaskGetSystemState() fornece dados estruturados sobre todas as tarefas, incluindo o tempo total de execução acumulado. Isso permite calcular a porcentagem de CPU utilizada por cada tarefa, algo essencial para análise temporal e balanceamento de carga.
TaskStatus_t taskStatusArray[10];
UBaseType_t taskCount;
uint32_t totalRunTime;
taskCount = uxTaskGetSystemState(
taskStatusArray,
10,
&totalRunTime
);
A partir desses dados, pode-se calcular métricas como CPU load por tarefa, identificar tarefas que consomem tempo excessivo ou confirmar se o sistema está respeitando o orçamento temporal planejado. Essa técnica é particularmente útil em sistemas com múltiplas tarefas periódicas, onde o somatório dos WCETs deve ser inferior ao tempo disponível.
O task monitor também é o local ideal para integrar watermarks de stack e heap. Ao percorrer a lista de tarefas e consultar uxTaskGetStackHighWaterMark() para cada uma, o sistema pode gerar alertas preventivos antes que uma falha crítica ocorra. Isso transforma erros tradicionalmente difíceis de reproduzir em eventos detectáveis e tratáveis.
Outra função estratégica do task monitor é correlacionar métricas temporais com eventos de tracing. Por exemplo, ao detectar aumento no tempo de CPU de uma tarefa específica, o monitor pode ativar um modo de tracing mais detalhado ou sinalizar externamente que o sistema entrou em uma condição anômala. Esse tipo de adaptação dinâmica é comum em sistemas embarcados de missão crítica.
Do ponto de vista arquitetural, é importante que o task monitor tenha prioridade baixa ou média, evitando interferir no comportamento temporal das tarefas críticas. Ele deve operar de forma periódica e previsível, coletando dados sem introduzir jitter ou latência excessiva.
xTaskCreate(
vSystemMonitorTask,
"SysMon",
512,
NULL,
tskIDLE_PRIORITY + 1,
NULL
);
Quando bem projetado, o task monitor atua como um “observador silencioso”, oferecendo visibilidade contínua do sistema sem comprometer sua execução. Em aplicações conectadas, ele pode ainda servir como base para telemetria, diagnóstico remoto e manutenção preditiva.
Na próxima e última seção, faremos a conclusão técnica, consolidando boas práticas e apresentando uma visão integrada de debug, tracing, análise temporal e watermark no ciclo de desenvolvimento com FreeRTOS. Após isso, entregaremos o material SEO completo, conforme solicitado.
Conclusão: Debug, Tracing, Análise Temporal e Watermark como Engenharia de Confiabilidade em FreeRTOS
Ao longo deste artigo, ficou evidente que desenvolver sistemas com FreeRTOS vai muito além de criar tarefas e sincronizá-las corretamente. Sistemas embarcados robustos exigem visibilidade, previsibilidade temporal e margens de segurança bem definidas. Debug, tracing, análise temporal e watermark não são ferramentas isoladas, mas partes complementares de uma mesma estratégia de engenharia.
O debug estruturado, por meio de hooks, assertivas e instrumentação consciente, permite detectar falhas no momento em que elas surgem, evitando comportamentos erráticos difíceis de reproduzir. O tracing adiciona uma dimensão histórica ao sistema, revelando a sequência de eventos que leva a problemas como starvation, inversão de prioridade ou jitter excessivo. Já a análise temporal transforma essas observações em métricas concretas, como WCET, latência e cumprimento de deadlines.
O conceito de watermark fecha esse ciclo ao fornecer evidências quantitativas do pior caso real, tanto para stack quanto para heap. Em vez de suposições ou margens arbitrárias, o engenheiro passa a trabalhar com dados observados em execução real, elevando significativamente a confiabilidade do sistema. Quando essas informações são consolidadas por um task monitor bem projetado, o firmware passa a ter autoconsciência operacional, algo cada vez mais necessário em sistemas IIoT, edge computing e aplicações industriais modernas.
Do ponto de vista de boas práticas, a principal recomendação é tratar observabilidade como parte da arquitetura desde o início do projeto. Instrumentação, monitoramento e análise devem ser planejados junto com o escalonamento, não adicionados como remendos tardios. Em FreeRTOS, o suporte a essas práticas já existe no kernel; cabe ao desenvolvedor utilizá-lo de forma consciente e técnica.
Com isso, encerramos este artigo da série, estabelecendo uma base sólida para desenvolvimento, diagnóstico e evolução contínua de sistemas embarcados em tempo real.