Introdução aos Sistemas Operacionais de Tempo Real (RTOS)
Em sistemas embarcados modernos, especialmente aqueles que lidam com múltiplas tarefas concorrentes, requisitos temporais rígidos e interação contínua com hardware, o uso de um Sistema Operacional de Tempo Real (RTOS – Real-Time Operating System) torna-se praticamente inevitável. Diferentemente de sistemas operacionais de propósito geral, um RTOS é projetado para oferecer determinismo temporal, ou seja, garantir que determinadas tarefas sejam executadas dentro de prazos previsíveis e bem definidos. Esse aspecto é crítico em aplicações como controle industrial, automotivo, robótica, telecomunicações, instrumentação médica e sistemas ciberfísicos.
Um RTOS introduz uma camada de abstração entre o firmware da aplicação e o hardware, oferecendo mecanismos formais para gerenciamento de tarefas (threads), escalonamento, sincronização, comunicação inter-tarefas, temporização e gerenciamento de memória. Em vez de depender de superloops complexos e difíceis de manter, o desenvolvedor passa a estruturar o software como um conjunto de tarefas cooperativas ou preemptivas, cada uma com responsabilidades bem delimitadas. Isso melhora significativamente a legibilidade, a escalabilidade e a manutenção do código, especialmente em projetos de médio e grande porte.
É importante destacar que “tempo real” não significa rapidez absoluta, mas sim previsibilidade. Um sistema pode ser rápido e ainda assim não ser de tempo real se não conseguir garantir prazos. RTOSs são classificados geralmente como hard real-time, firm real-time ou soft real-time, dependendo do impacto que a perda de um prazo causa ao sistema. Em microcontroladores, a maioria das aplicações industriais e IoT utiliza RTOSs voltados ao soft e firm real-time, equilibrando determinismo, uso eficiente de recursos e simplicidade de implementação.
Ao longo deste artigo, iremos analisar os principais RTOSs utilizados no ecossistema de microcontroladores e sistemas embarcados — como FreeRTOS, ThreadX (Azure RTOS), Zephyr, CMSIS-RTOS2, entre outros — comparando suas arquiteturas, modelos de escalonamento, consumo de recursos, desempenho, curva de aprendizado e facilidade de integração com toolchains e HALs (Hardware Abstraction Layers). O objetivo é fornecer uma visão técnica clara e prática, permitindo que você escolha conscientemente o RTOS mais adequado ao seu projeto.
Conceitos Fundamentais de um RTOS
Para compreender corretamente as diferenças entre FreeRTOS, ThreadX, Zephyr, CMSIS-RTOS2 e outros, é essencial estabelecer uma base conceitual comum. Embora cada RTOS tenha suas particularidades de implementação, todos compartilham um conjunto de conceitos fundamentais que definem seu funcionamento e impacto no desempenho do sistema embarcado.
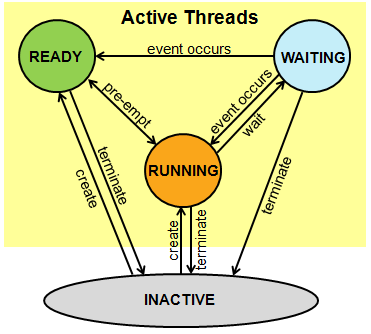
O primeiro conceito central é o de tarefa (task ou thread). Uma tarefa representa uma unidade independente de execução, normalmente implementada como uma função em linguagem C associada a uma pilha própria (stack). Cada tarefa possui um contexto de execução (registradores, ponteiro de pilha, estado) que pode ser salvo e restaurado pelo kernel do RTOS. Diferentemente de funções tradicionais em um superloop, tarefas podem ser suspensas, retomadas, bloqueadas ou preemptadas, permitindo que múltiplas atividades coexistam de forma estruturada e previsível.
O escalonador (scheduler) é o componente responsável por decidir qual tarefa será executada a cada instante. Em sistemas de tempo real, o escalonamento é normalmente baseado em prioridades, onde tarefas mais críticas possuem prioridade maior e podem interromper tarefas menos críticas. A maioria dos RTOSs modernos utiliza escalonamento preemptivo, no qual uma tarefa de maior prioridade pode interromper imediatamente a execução de outra, garantindo menor latência para eventos críticos. Alguns RTOSs também oferecem modos cooperativos, úteis em sistemas extremamente restritos ou em aplicações educacionais.
Outro pilar essencial é a comunicação e sincronização entre tarefas, frequentemente chamada de IPC (Inter-Process Communication). Como várias tarefas compartilham recursos de hardware e dados, o RTOS fornece mecanismos como semáforos, mutexes, filas (queues), mailboxes, event flags e streams. Esses mecanismos não apenas permitem a troca segura de dados, mas também resolvem problemas clássicos de concorrência, como condições de corrida (race conditions) e inversão de prioridade, sendo esta última frequentemente tratada com protocolos como priority inheritance.
A temporização é outro aspecto crítico em RTOSs. Funções de atraso determinístico, temporizadores de software (software timers) e contadores de ticks permitem que tarefas sejam executadas periodicamente ou após intervalos bem definidos. Em microcontroladores, o tick do sistema geralmente é gerado por um temporizador de hardware, como o SysTick em arquiteturas ARM Cortex-M. A resolução temporal, o consumo de CPU e a latência de interrupções estão diretamente ligados à configuração desse tick.
Por fim, há o gerenciamento de memória, que pode variar bastante entre RTOSs. Alguns utilizam exclusivamente alocação estática, outros permitem alocação dinâmica controlada, e há ainda sistemas que suportam múltiplas estratégias de heap. Em ambientes embarcados, onde RAM é limitada e fragmentação é um risco real, a política de memória adotada pelo RTOS tem impacto direto na confiabilidade do sistema a longo prazo.
Com esses conceitos em mente, já temos a base necessária para analisar cada RTOS de forma crítica. Na próxima etapa, entraremos no FreeRTOS, explorando sua arquitetura, modelo de escalonamento, desempenho, footprint e por que ele se tornou praticamente um padrão de fato na indústria de microcontroladores.
FreeRTOS: Arquitetura, Filosofia e Características Técnicas
O FreeRTOS é, hoje, o RTOS mais difundido no ecossistema de microcontroladores. Criado inicialmente por Richard Barry e atualmente mantido sob o guarda-chuva da AWS, ele se consolidou como uma solução leve, portátil e extremamente pragmática, adotada por fabricantes como STMicroelectronics, NXP, Microchip, Espressif, Renesas e muitos outros. Sua popularidade não vem de sofisticação excessiva, mas de um equilíbrio muito bem resolvido entre determinismo, baixo consumo de recursos e simplicidade de uso.
Do ponto de vista arquitetural, o FreeRTOS possui um kernel monolítico compacto, escrito majoritariamente em C, com forte separação entre código independente de arquitetura e ports específicos para cada família de microcontroladores. Essa abordagem facilita a portabilidade e permite que o kernel funcione desde MCUs de 8 bits até arquiteturas ARM Cortex-M, RISC-V e DSPs. O escalonador é prioritário e preemptivo por padrão, com suporte opcional a modo cooperativo, o que permite adequar o comportamento do sistema ao nível de complexidade e previsibilidade exigido pela aplicação.
O modelo de tarefas do FreeRTOS é intencionalmente simples. Cada tarefa possui prioridade fixa, pilha dedicada e pode assumir estados bem definidos como Running, Ready, Blocked e Suspended. A troca de contexto é eficiente e previsível, característica fundamental para aplicações de tempo real. O kernel não impõe políticas complexas de hierarquia ou isolamento, o que reduz overhead e torna o comportamento do sistema mais fácil de analisar — algo altamente valorizado em sistemas críticos e industriais.
Em termos de IPC e sincronização, o FreeRTOS oferece um conjunto bastante completo: queues, binary semaphores, counting semaphores, mutexes com herança de prioridade, event groups e stream/message buffers. Um ponto importante é que muitas dessas primitivas são construídas sobre o mesmo mecanismo interno de filas, o que simplifica o kernel e reduz redundâncias. Essa decisão arquitetural favorece previsibilidade e facilita o entendimento do código-fonte por desenvolvedores mais experientes.
O gerenciamento de memória no FreeRTOS é um de seus diferenciais práticos. Ele oferece múltiplas implementações de heap (heap_1 a heap_5), permitindo desde alocação totalmente estática até estratégias mais flexíveis com free() e coalescência de blocos. Essa abordagem dá ao desenvolvedor controle explícito sobre o trade-off entre flexibilidade e segurança, algo essencial em sistemas embarcados com RAM limitada e longos tempos de operação contínua.
Do ponto de vista de desempenho, o FreeRTOS apresenta latências de interrupção e troca de contexto muito baixas, especialmente em Cortex-M, sendo adequado para aplicações soft e firm real-time. Seu footprint típico pode variar de alguns poucos kilobytes de Flash e RAM, dependendo das funcionalidades habilitadas, o que o torna viável até mesmo em microcontroladores modestos. A curva de aprendizado é considerada baixa, especialmente quando integrada a ecossistemas como STM32Cube, ESP-IDF ou MPLAB Harmony.
Apesar de suas vantagens, o FreeRTOS não é um RTOS de propósito geral completo: ele não oferece nativamente device model, file system, network stack ou user space. Essas funcionalidades existem como bibliotecas adicionais ou integrações externas. Essa limitação, no entanto, é muitas vezes uma virtude, pois evita camadas desnecessárias em sistemas onde cada byte e cada ciclo de CPU contam.
Na próxima seção, avançaremos para o ThreadX (Azure RTOS), explorando como ele difere do FreeRTOS em termos de desempenho, organização interna, serviços oferecidos e perfil de aplicação.
ThreadX (Azure RTOS): Desempenho, Determinismo e Integração Industrial
O ThreadX, atualmente parte do ecossistema Azure RTOS, foi projetado desde sua origem com um foco muito claro: alto desempenho determinístico e robustez para sistemas embarcados industriais e comerciais. Diferentemente do FreeRTOS, que prioriza minimalismo e flexibilidade, o ThreadX adota uma filosofia mais estruturada, oferecendo um conjunto mais amplo de serviços de sistema prontos para uso, com forte ênfase em previsibilidade temporal e escalabilidade.
Arquiteturalmente, o ThreadX também utiliza um kernel compacto e preemptivo, com escalonamento baseado em prioridades, porém com algumas diferenças importantes. Ele suporta até 1024 níveis de prioridade, o que permite um controle extremamente fino do comportamento do sistema, algo particularmente útil em aplicações complexas como automotivas, aeroespaciais e de instrumentação avançada. O escalonador é altamente otimizado e utiliza técnicas de bitmaps para seleção rápida da próxima thread a ser executada, resultando em tempos de decisão praticamente constantes (O(1)), independentemente do número de threads ativas.
O modelo de threads no ThreadX é mais rigoroso do que no FreeRTOS. Cada thread possui ciclo de vida bem definido, estados explícitos e uma API consistente para criação, suspensão, retomada e término. O kernel impõe mais disciplina ao desenvolvedor, o que reduz erros de projeto em sistemas grandes, mas também eleva ligeiramente a curva de aprendizado. Em contrapartida, essa rigidez facilita auditorias, certificações e análises formais de comportamento — fatores decisivos em ambientes regulados.
Em termos de IPC e sincronização, o ThreadX oferece semaphores, mutexes, event flags, queues e thread-safe memory pools. Um diferencial técnico importante é o suporte nativo a memory pools determinísticos, que evitam fragmentação e tornam o tempo de alocação e liberação previsível. Essa característica é particularmente valiosa em sistemas hard ou firm real-time, onde alocação dinâmica tradicional pode introduzir jitter inaceitável.
No quesito temporização, o ThreadX se destaca pela precisão. O kernel foi projetado para minimizar latências associadas ao tick do sistema, e sua integração com timers de hardware é extremamente eficiente. Além disso, ele oferece mecanismos avançados para timeouts e temporizadores de aplicação, mantendo comportamento consistente mesmo sob alta carga de interrupções e múltiplas threads concorrentes.
Um dos grandes diferenciais do ThreadX é o ecossistema Azure RTOS, que inclui componentes fortemente integrados como NetX/NetX Duo (pilha TCP/IP), FileX (sistema de arquivos), USBX (USB device/host) e GUIX (interface gráfica). Esses módulos seguem a mesma filosofia de desempenho e determinismo do kernel, formando uma plataforma coesa para sistemas embarcados conectados e com interfaces complexas. Para muitos fabricantes, isso reduz significativamente o tempo de desenvolvimento e validação.
Em termos de desempenho e footprint, o ThreadX frequentemente apresenta resultados superiores ao FreeRTOS em benchmarks de troca de contexto e escalonamento sob carga, especialmente em arquiteturas ARM Cortex-M e Cortex-A embarcadas. O custo disso é um consumo um pouco maior de Flash e RAM, além de uma base conceitual mais densa. Ainda assim, ele permanece perfeitamente viável para microcontroladores de médio porte.
Na próxima seção, analisaremos o Zephyr RTOS, que representa uma abordagem diferente: mais próxima de um sistema operacional embarcado completo, com forte integração a drivers, device tree e uma comunidade open source ampla.
Zephyr RTOS: Um Sistema Operacional Embarcado Completo
O Zephyr RTOS representa uma mudança significativa de paradigma em relação a RTOSs clássicos como FreeRTOS e ThreadX. Em vez de focar exclusivamente no kernel e em primitivas básicas de tempo real, o Zephyr foi concebido como um sistema operacional embarcado completo, modular e escalável, mantido pela Linux Foundation e apoiado por grandes players da indústria como Intel, Nordic, NXP e STMicroelectronics. Seu objetivo central é atender sistemas embarcados modernos, conectados, seguros e altamente configuráveis.
Do ponto de vista arquitetural, o Zephyr combina um kernel preemptivo de tempo real com uma infraestrutura robusta de drivers, subsistemas e serviços de sistema. Ele suporta múltiplos modelos de escalonamento, incluindo prioridades fixas preemptivas, cooperativas e híbridas. O kernel foi projetado para escalar desde MCUs pequenos até SoCs mais complexos, embora seu verdadeiro potencial apareça em microcontroladores de médio e alto desempenho, onde há Flash e RAM suficientes para sustentar sua infraestrutura mais rica.
Um dos elementos mais distintivos do Zephyr é o uso extensivo de Device Tree, conceito herdado do ecossistema Linux. Em vez de configurar periféricos diretamente no código, o hardware é descrito de forma declarativa, permitindo que drivers e subsistemas sejam reutilizados sem modificações. Isso reduz o acoplamento entre aplicação e hardware, melhora a portabilidade e aproxima o desenvolvimento embarcado de práticas modernas de engenharia de software. No entanto, essa abordagem impõe uma curva de aprendizado significativamente maior, especialmente para desenvolvedores acostumados a HALs tradicionais.
No campo de IPC e sincronização, o Zephyr oferece praticamente tudo que se espera de um RTOS moderno: threads, mutexes, semaphores, queues, message queues, event objects, pipes e workqueues. Além disso, ele incorpora mecanismos de user space e isolamento de memória em arquiteturas que suportam MPU (Memory Protection Unit), o que o diferencia fortemente de FreeRTOS e ThreadX. Esse recurso aumenta a robustez e a segurança, sendo particularmente relevante para aplicações IoT conectadas à internet.
O gerenciamento de memória no Zephyr é sofisticado e flexível. Ele suporta alocadores dinâmicos, slabs de memória determinísticos, pilhas configuráveis e separação entre memória de kernel e de usuário. Embora isso traga benefícios claros em termos de segurança e organização, também resulta em maior consumo de recursos e maior complexidade de configuração. Em sistemas muito restritos, essa sofisticação pode ser excessiva.
Em termos de desempenho, o Zephyr apresenta latências previsíveis e bom comportamento em aplicações soft e firm real-time, mas geralmente não atinge os mesmos tempos mínimos de troca de contexto de kernels ultra-enxutos como FreeRTOS ou ThreadX. Esse trade-off é intencional: o Zephyr sacrifica alguns microssegundos de latência em favor de uma arquitetura mais rica, segura e extensível. Para aplicações IoT, gateways, dispositivos conectados e produtos comerciais complexos, essa troca costuma ser plenamente aceitável.
Na próxima seção, abordaremos o CMSIS-RTOS2, explicando seu papel como camada de padronização, sua relação com kernels como FreeRTOS e RTX, e quando ele realmente faz sentido em projetos ARM Cortex-M.
CMSIS-RTOS2: Padronização e Abstração no Ecossistema ARM
O CMSIS-RTOS2 não é, por si só, um RTOS no sentido tradicional, mas sim uma camada de abstração e padronização definida pela ARM para sistemas operacionais de tempo real em arquiteturas Cortex-M e Cortex-A embarcado. Seu papel principal é fornecer uma API unificada, permitindo que aplicações sejam escritas de forma relativamente independente do kernel subjacente. Essa abordagem busca resolver um problema recorrente na indústria: a forte dependência do código de aplicação em relação a um RTOS específico.
Historicamente, a ARM forneceu o RTX como implementação de referência do CMSIS-RTOS. Na versão 2 da especificação, a API foi modernizada para refletir práticas mais maduras de RTOS, incluindo conceitos como threads, thread flags, event flags, mutexes, semaphores, message queues e timers. A grande diferença em relação ao CMSIS-RTOS original é que o CMSIS-RTOS2 foi projetado para mapear com mais fidelidade os recursos oferecidos por kernels modernos como FreeRTOS, ThreadX e outros.
Do ponto de vista arquitetural, o CMSIS-RTOS2 atua como uma camada intermediária entre a aplicação e o kernel real. Por exemplo, em muitos projetos com STM32, o FreeRTOS é utilizado como kernel, enquanto a aplicação interage exclusivamente com a API CMSIS-RTOS2. Isso permite, ao menos em teoria, substituir o RTOS subjacente com impacto mínimo no código da aplicação, desde que as funcionalidades utilizadas estejam dentro do escopo da API padronizada.
Essa estratégia traz vantagens claras em termos de portabilidade e manutenção de longo prazo, especialmente em ambientes corporativos e industriais onde diferentes linhas de produtos podem adotar kernels distintos. Além disso, o CMSIS-RTOS2 se integra naturalmente ao ecossistema CMSIS-Core, CMSIS-DSP e CMSIS-Driver, criando uma experiência mais coesa para desenvolvedores ARM. Ferramentas como STM32CubeMX, por exemplo, geram código baseado em CMSIS-RTOS2 por padrão, o que reduz a dependência direta de APIs específicas do FreeRTOS.
No entanto, essa abstração tem um custo. O CMSIS-RTOS2 não expõe todas as funcionalidades avançadas de cada kernel. Recursos específicos como stream buffers do FreeRTOS, memory pools especializados do ThreadX ou mecanismos avançados do Zephyr podem não estar disponíveis ou exigem acesso direto à API nativa do RTOS. Além disso, há um pequeno overhead conceitual e, em alguns casos, de desempenho, devido à camada adicional de abstração.
Do ponto de vista de desempenho e determinismo, o CMSIS-RTOS2 não altera significativamente o comportamento do kernel subjacente, desde que bem implementado. A troca de contexto, latência de interrupções e escalonamento continuam sendo definidos pelo RTOS real. O impacto está mais relacionado à flexibilidade e à capacidade de exploração total do sistema do que a números absolutos de tempo.
Na próxima seção, ampliaremos a visão e abordaremos outros RTOSs relevantes, como RT-Thread, NuttX, embOS e ChibiOS, contextualizando onde cada um se encaixa no panorama atual de sistemas embarcados.
Outros RTOSs Relevantes: RT-Thread, NuttX, embOS e ChibiOS
Além dos RTOSs mais conhecidos, existe um conjunto de soluções maduras que atendem nichos específicos e, em muitos casos, oferecem características técnicas bastante interessantes. Conhecê-las amplia o repertório do engenheiro e evita escolhas automáticas que nem sempre são as mais adequadas ao problema em mãos.
O RT-Thread é um RTOS de origem chinesa que vem ganhando espaço globalmente, especialmente em aplicações IoT e industriais. Ele adota uma arquitetura em camadas, oferecendo um kernel de tempo real relativamente enxuto combinado com um ecossistema opcional de componentes, como sistema de arquivos, pilha TCP/IP, shell interativo e suporte a dispositivos. Um diferencial do RT-Thread é sua abordagem híbrida: ele pode operar tanto como um RTOS clássico quanto como um RTOS com características de sistema operacional embarcado, dependendo da configuração. Em termos de desempenho, é comparável ao FreeRTOS, com footprint competitivo, porém com uma comunidade e documentação ainda mais concentradas na Ásia.
O NuttX segue uma filosofia radicalmente diferente. Ele é frequentemente descrito como um “POSIX-like RTOS”, pois implementa uma grande parte das APIs e abstrações do mundo Unix/POSIX. Isso inclui processos, sistema de arquivos virtual, drivers padronizados e, em algumas configurações, até user space real. O NuttX é amplamente utilizado em projetos que desejam reutilizar código de aplicações Linux em microcontroladores ou SoCs embarcados. O custo dessa compatibilidade é claro: maior complexidade e maior consumo de recursos. Em termos de determinismo, o NuttX atende bem aplicações soft real-time, mas geralmente não é a primeira escolha para controle de tempo extremamente rígido em MCUs pequenos.
O embOS, desenvolvido pela SEGGER, representa uma abordagem comercial e altamente otimizada. Ele é conhecido por sua eficiência, latência extremamente baixa e integração profunda com ferramentas profissionais como o J-Link e o SystemView. O embOS é amplamente utilizado em ambientes industriais, médicos e automotivos onde confiabilidade, suporte técnico e certificações são fatores decisivos. Seu kernel é compacto e determinístico, mas, por ser uma solução proprietária, envolve custos de licenciamento que o tornam menos comum em projetos acadêmicos ou de baixo orçamento.
O ChibiOS ocupa uma posição intermediária interessante. Ele oferece um kernel RTOS eficiente, com excelente suporte a ARM Cortex-M, aliado a um HAL bem estruturado e consistente. O ChibiOS é frequentemente elogiado pela qualidade do código-fonte e clareza arquitetural, sendo uma ótima opção para quem deseja entender profundamente o funcionamento de um RTOS sem lidar com a complexidade de sistemas maiores como Zephyr ou NuttX. Embora sua comunidade seja menor que a do FreeRTOS, ele é tecnicamente sólido e bastante previsível em termos de desempenho.
Esses RTOSs demonstram que não existe uma solução universal. Cada um reflete decisões arquiteturais específicas, equilibrando desempenho, portabilidade, complexidade, licenciamento e ecossistema. Essa diversidade é saudável e permite que o engenheiro escolha a ferramenta mais adequada ao contexto técnico, regulatório e econômico do projeto.
Na próxima seção, faremos um comparativo direto de funcionalidades e desempenho entre FreeRTOS, ThreadX, Zephyr, CMSIS-RTOS2 e esses RTOSs complementares, destacando pontos fortes, limitações e cenários ideais de uso.
Comparativo de Funcionalidades, Desempenho e Facilidade de Uso
Após analisar individualmente os principais RTOSs, é possível estabelecer um comparativo técnico mais objetivo, observando como cada solução se posiciona em termos de funcionalidades oferecidas, desempenho temporal, consumo de recursos e facilidade de desenvolvimento. Essa comparação não deve ser vista como um ranking absoluto, mas como um guia prático para tomada de decisão arquitetural.
Do ponto de vista de funcionalidades, o FreeRTOS e o ThreadX oferecem conjuntos semelhantes no nível do kernel, cobrindo com eficiência tarefas, escalonamento preemptivo, IPC e temporização. O ThreadX, no entanto, se destaca pela oferta integrada de módulos adicionais (NetX, FileX, USBX, GUIX), formando uma plataforma mais completa sem necessidade de integrações externas. Já o Zephyr vai além, oferecendo nativamente um ecossistema de drivers, pilhas de comunicação, segurança, device model e suporte a user space, posicionando-se como um verdadeiro sistema operacional embarcado. O CMSIS-RTOS2, por sua vez, não compete em funcionalidades próprias, mas atua como um uniformizador de APIs, simplificando a portabilidade entre kernels ARM.
Em termos de desempenho e determinismo, kernels mais enxutos tendem a levar vantagem. ThreadX e FreeRTOS apresentam latências de interrupção e tempos de troca de contexto muito baixos, sendo altamente adequados para aplicações soft e firm real-time exigentes. O ThreadX geralmente demonstra comportamento mais estável sob carga elevada, graças a seu escalonador otimizado e uso extensivo de estruturas determinísticas. O Zephyr, embora previsível, apresenta overhead maior devido à sua infraestrutura mais rica, o que pode impactar aplicações extremamente sensíveis a latência. RTOSs como embOS e ChibiOS também se destacam nesse quesito, frequentemente competindo com ou superando o FreeRTOS em benchmarks específicos.
Quanto ao consumo de recursos, o FreeRTOS permanece como uma das opções mais econômicas em Flash e RAM, especialmente quando configurado de forma minimalista. ThreadX exige um pouco mais de memória, mas entrega maior previsibilidade e serviços adicionais. Zephyr e NuttX demandam significativamente mais recursos, o que os torna mais adequados a MCUs com maior capacidade ou SoCs embarcados. O CMSIS-RTOS2 não altera substancialmente o consumo, pois depende diretamente do kernel subjacente.
No aspecto de facilidade de uso e curva de aprendizado, o FreeRTOS é amplamente reconhecido como o mais acessível, especialmente quando integrado a ambientes como STM32CubeMX ou ESP-IDF. ThreadX exige maior disciplina conceitual, mas recompensa com robustez e clareza estrutural em projetos grandes. Zephyr possui a curva de aprendizado mais íngreme, devido ao uso de device tree, Kconfig e uma arquitetura mais próxima do mundo Linux. O CMSIS-RTOS2 facilita a vida de equipes que trabalham exclusivamente com ARM, mas pode limitar o acesso a recursos avançados específicos de cada kernel.
De forma resumida, é possível traçar alguns cenários típicos de escolha:
– FreeRTOS: projetos embarcados gerais, IoT, produtos comerciais de pequeno e médio porte.
– ThreadX (Azure RTOS): sistemas industriais, automotivos e comerciais com forte exigência de determinismo e integração.
– Zephyr: dispositivos conectados complexos, IoT avançado, produtos com requisitos de segurança e escalabilidade.
– CMSIS-RTOS2: ambientes ARM que priorizam padronização e portabilidade entre RTOSs.
– embOS / ChibiOS / RT-Thread: nichos específicos onde desempenho, clareza arquitetural ou suporte comercial são decisivos.
Na próxima e última parte, apresentarei uma conclusão técnica e recomendações práticas, conectando esses RTOSs a critérios reais de projeto, como tipo de aplicação, equipe, ciclo de vida do produto e requisitos de certificação.
Seção 9 — Conclusão Técnica e Recomendações Práticas de Escolha
A escolha de um RTOS não deve ser tratada como uma decisão puramente técnica isolada, mas como uma decisão arquitetural estratégica, que impacta diretamente o desempenho, a manutenibilidade, a escalabilidade e até a viabilidade comercial de um produto embarcado. Ao longo deste artigo, ficou claro que não existe um “melhor RTOS universal”, mas sim soluções mais adequadas a contextos específicos de hardware, equipe e requisitos de sistema.
Para projetos simples a moderadamente complexos, especialmente em microcontroladores com recursos limitados, o FreeRTOS continua sendo a escolha mais pragmática. Seu baixo footprint, vasta adoção industrial, abundância de exemplos e integração com praticamente todos os ecossistemas de MCU o tornam ideal para produtos IoT, automação leve, instrumentação e aplicações comerciais de grande escala. Quando o domínio do hardware é total e o time precisa de controle fino e previsível, o FreeRTOS entrega exatamente o necessário, sem camadas supérfluas.
Em sistemas que exigem alto determinismo, desempenho consistente sob carga e maturidade para certificações, o ThreadX (Azure RTOS) se destaca. Ele é particularmente adequado para ambientes industriais, médicos e automotivos, onde previsibilidade temporal e organização estrutural são tão importantes quanto desempenho bruto. Seu ecossistema integrado reduz riscos de integração e acelera o desenvolvimento de produtos complexos, desde que o time esteja preparado para lidar com uma base conceitual mais rigorosa.
O Zephyr RTOS deve ser visto como uma escolha de longo prazo para produtos conectados e escaláveis, especialmente quando segurança, portabilidade e reutilização de drivers são prioridades. Ele exige investimento inicial maior em aprendizado e configuração, mas entrega uma base arquitetural moderna, alinhada com práticas do mundo Linux e com as demandas de sistemas IoT de próxima geração. Em dispositivos que evoluirão ao longo do tempo, com múltiplas variantes de hardware, esse investimento costuma se pagar.
O CMSIS-RTOS2 cumpre um papel essencial em organizações que trabalham fortemente com ARM Cortex-M, oferecendo padronização e reduzindo o acoplamento entre aplicação e kernel. Ele é particularmente útil em projetos corporativos de longa duração, embora não deva ser encarado como substituto completo das APIs nativas dos RTOSs quando funcionalidades avançadas são necessárias.
Por fim, RTOSs como embOS, ChibiOS, RT-Thread e NuttX mostram que há excelentes alternativas fora do eixo mais popular. Eles são especialmente relevantes quando fatores como suporte comercial, clareza arquitetural, compatibilidade POSIX ou mercados regionais específicos entram em jogo. Um engenheiro experiente deve conhecê-los, mesmo que não os utilize diariamente.
Em síntese, a escolha consciente de um RTOS passa por responder a perguntas fundamentais:
– Qual o nível real de determinismo exigido?
– Qual o tamanho e a experiência da equipe?
– O produto precisará evoluir por muitos anos?
– Há exigências regulatórias ou de certificação?
– Qual o custo aceitável em memória, tempo e complexidade?
Responder a essas questões com clareza leva, quase naturalmente, ao RTOS correto.